#include <station.h>
|
| | Station (ros::NodeHandle n, std::string odom_topic) |
| |
| void | setPosition (double X, double Y, double Z) |
| |
| void | setTime (double t) |
| |
| double | getX () const |
| |
| double | getY () const |
| |
| double | getZ () const |
| |
| double | getT () const |
| |
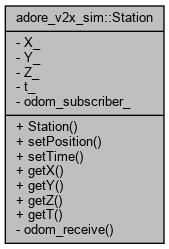
Station tracks position and time of a v2x sender/receiver.
◆ Station()
| adore_v2x_sim::Station::Station |
( |
ros::NodeHandle |
n, |
|
|
std::string |
odom_topic |
|
) |
| |
|
inline |
◆ getT()
| double adore_v2x_sim::Station::getT |
( |
| ) |
const |
|
inline |
◆ getX()
| double adore_v2x_sim::Station::getX |
( |
| ) |
const |
|
inline |
◆ getY()
| double adore_v2x_sim::Station::getY |
( |
| ) |
const |
|
inline |
◆ getZ()
| double adore_v2x_sim::Station::getZ |
( |
| ) |
const |
|
inline |
◆ odom_receive()
| void adore_v2x_sim::Station::odom_receive |
( |
nav_msgs::OdometryConstPtr |
msg | ) |
|
|
inlineprivate |
◆ setPosition()
| void adore_v2x_sim::Station::setPosition |
( |
double |
X, |
|
|
double |
Y, |
|
|
double |
Z |
|
) |
| |
|
inline |
◆ setTime()
| void adore_v2x_sim::Station::setTime |
( |
double |
t | ) |
|
|
inline |
◆ odom_subscriber_
| ros::Subscriber adore_v2x_sim::Station::odom_subscriber_ |
|
private |
◆ t_
| double adore_v2x_sim::Station::t_ |
|
private |
◆ X_
| double adore_v2x_sim::Station::X_ |
|
private |
◆ Y_
| double adore_v2x_sim::Station::Y_ |
|
private |
◆ Z_
| double adore_v2x_sim::Station::Z_ |
|
private |
The documentation for this class was generated from the following file:
- /home/fascar/temp/adore/adore_v2x_sim/adore_v2x_sim/include/adore_v2x_sim/station.h