|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <catch2/catch.hpp>#include "adore/mad/adoremath.h"#include "adore/mad/arraymatrixtools.h"#include "adore/mad/centerandlanewidth.h"#include <iostream>#include <fstream>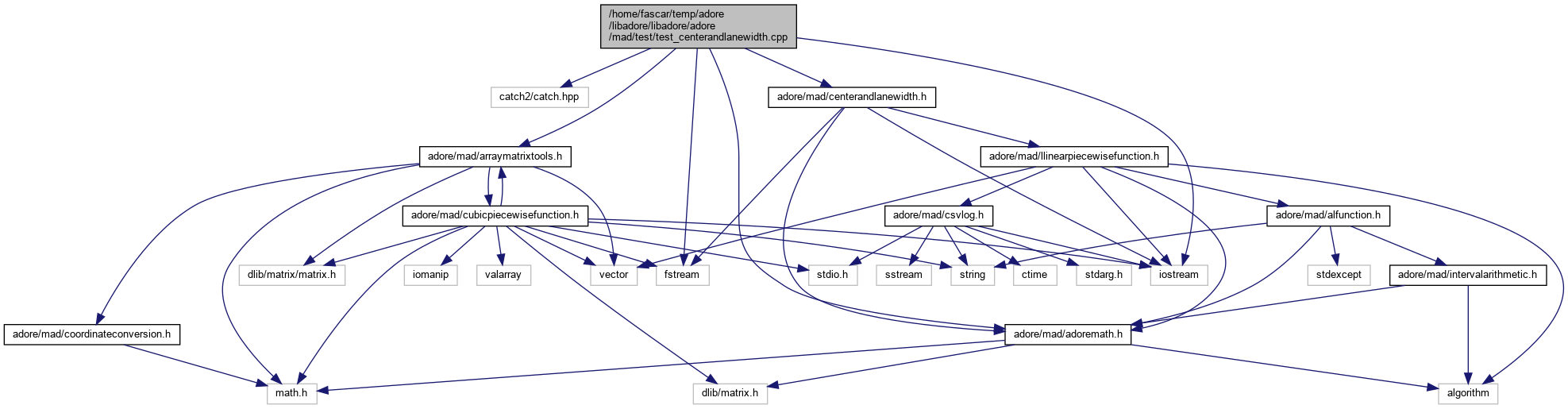
Macros | |
| #define | CATCH_CONFIG_MAIN |
Functions | |
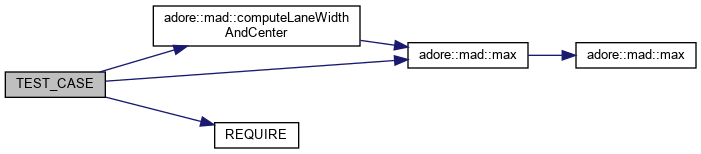
| TEST_CASE ("testing centerandlanewidth with N=1 and M=2", "[centerandlanewidth]") | |
| TEST_CASE ("testing centerandlanewidth with symmetric lane segment w/ N=2, M=2", "[centerandlanewidth]") | |
| TEST_CASE ("testing centerandlanewidth misaligned rear w/ N==3, M==3", "[centerandlanewidth]") | |
| TEST_CASE ("testing centerandlanewidth with u shape for right N==2, M==4", "[centerandlanewidth]") | |
| TEST_CASE ("testing centerandlanewidth with small real-world example, N=6, M=13") | |
| #define CATCH_CONFIG_MAIN |
| TEST_CASE | ( | "testing centerandlanewidth misaligned rear w/ | N = =3 | ) |

| TEST_CASE | ( | ) |

| TEST_CASE | ( | "testing centerandlanewidth with small real-world | example, |
| N | = 6 |
||
| ) |

| TEST_CASE | ( | "testing centerandlanewidth with symmetric lane segment w/ | N = 2 | ) |

| TEST_CASE | ( | "testing centerandlanewidth with u shape for right | N = =2 | ) |