|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
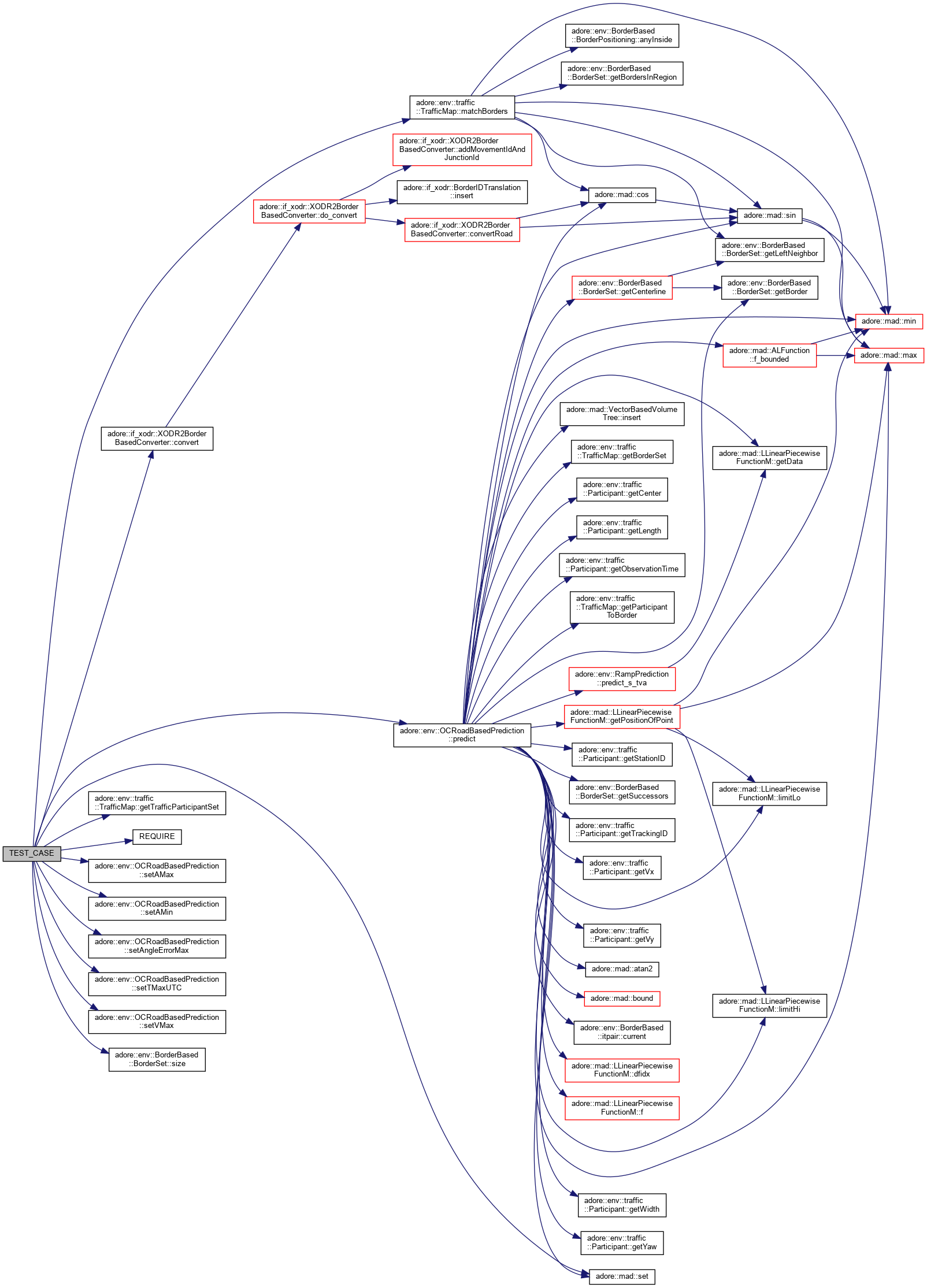
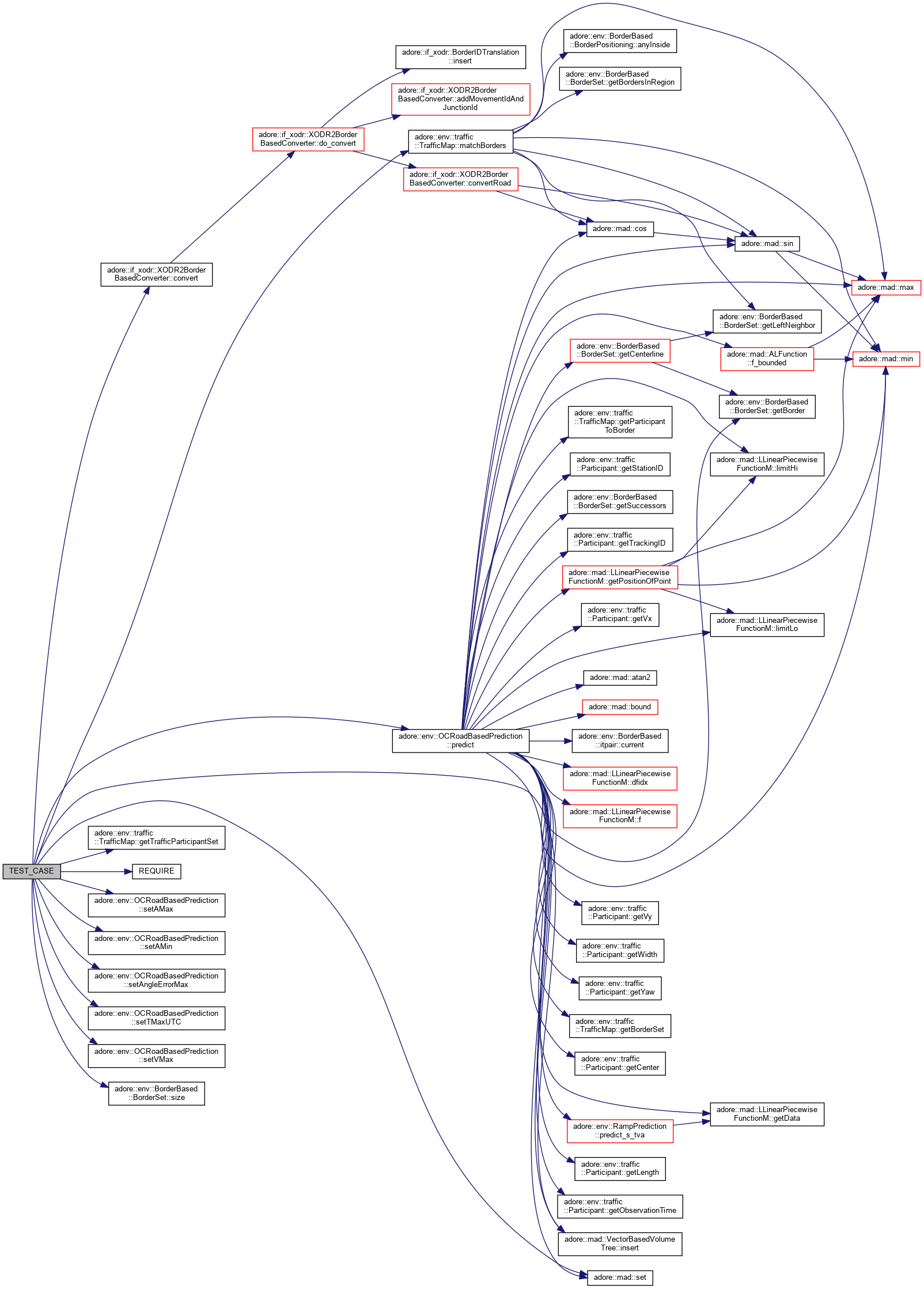
#include <catch2/catch.hpp>#include <adore/env/traffic/ocroadbasedprediction.h>#include <adore/if_xodr/xodr2borderbased.h>#include <string>#include <filesystem>#include <unistd.h>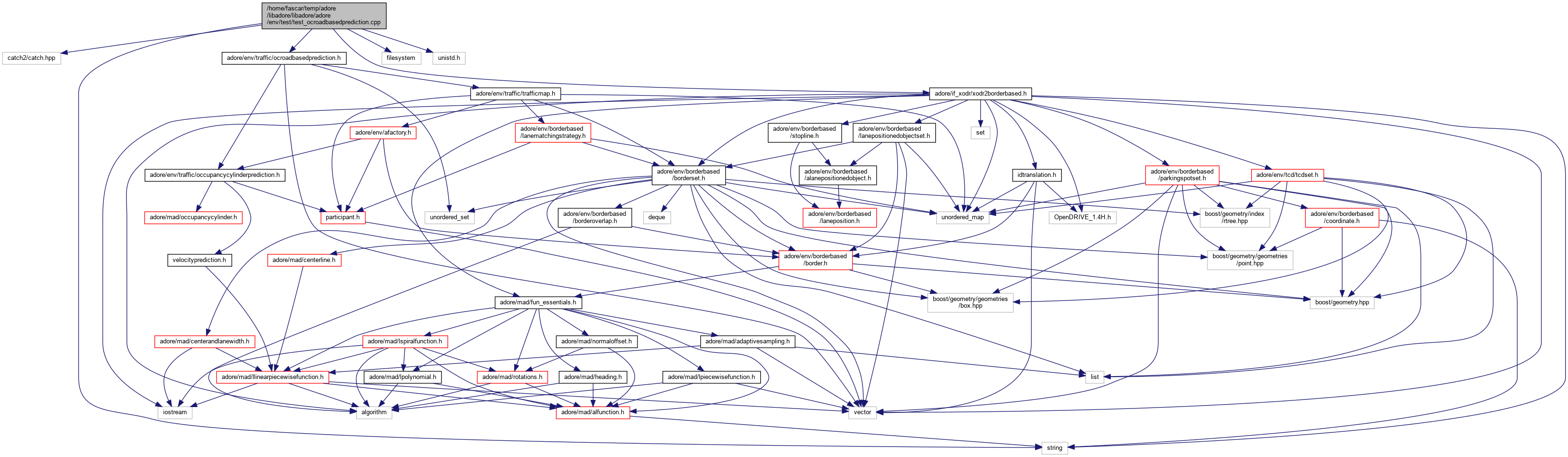
Functions | |
| TEST_CASE ("OCRoadBasedPrediction: predict on circle 50m", "[ocroadbasedprediction]") | |
| TEST_CASE ("OCRoadBasedPrediction: predict 3 branches at junction", "[ocroadbasedprediction]") | |
| TEST_CASE | ( | "OCRoadBasedPrediction: predict 3 branches at junction" | , |
| "" | [ocroadbasedprediction] | ||
| ) |
| TEST_CASE | ( | "OCRoadBasedPrediction: predict on circle 50m" | , |
| "" | [ocroadbasedprediction] | ||
| ) |