|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
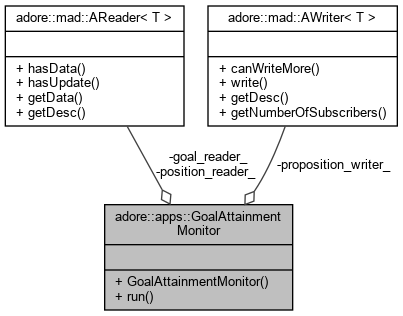
A class, which monitors distance between vehicle and goal. More...
#include <monitor0.h>
Public Member Functions | |
| GoalAttainmentMonitor (adore::env::AFactory::TNavigationGoalReader *goal_reader, adore::env::AFactory::TVehicleMotionStateReader *position_reader, adore::env::AFactory::TPropositionWriter *proposition_writer) | |
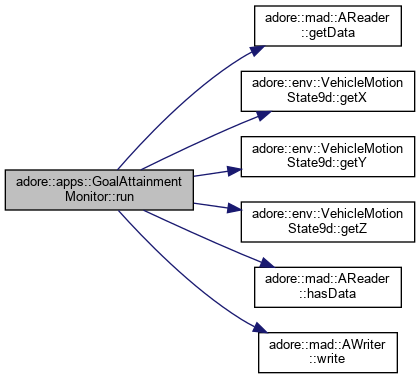
| void | run () |
A class, which monitors distance between vehicle and goal.
|
inline |
|
inline |

|
private |
|
private |
|
private |