|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <objectdetectionmodel.h>
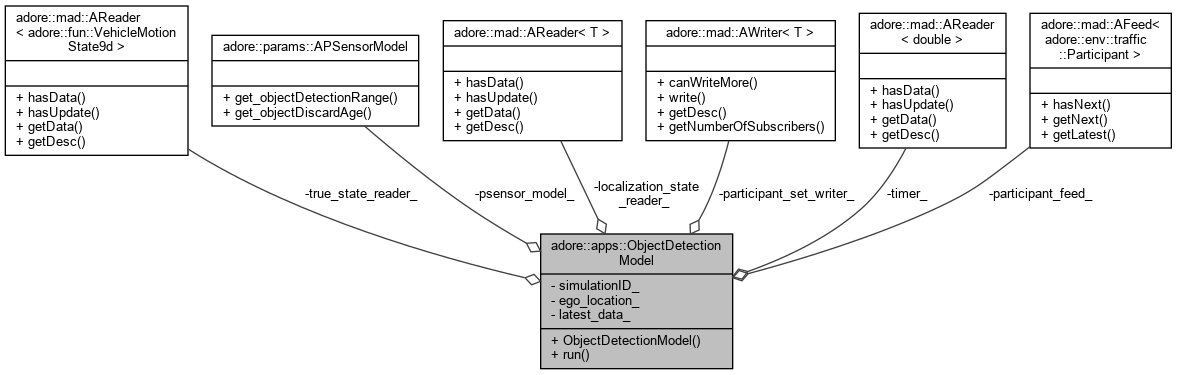
Public Member Functions | |
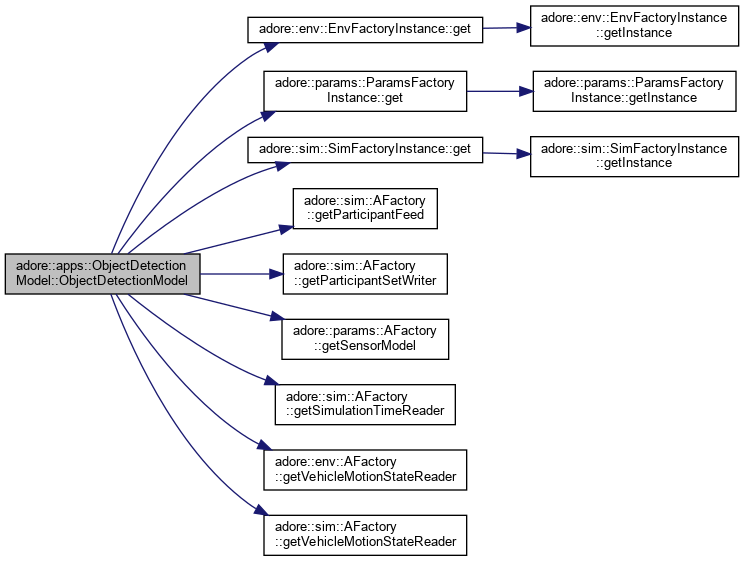
| ObjectDetectionModel (int simulationID) | |
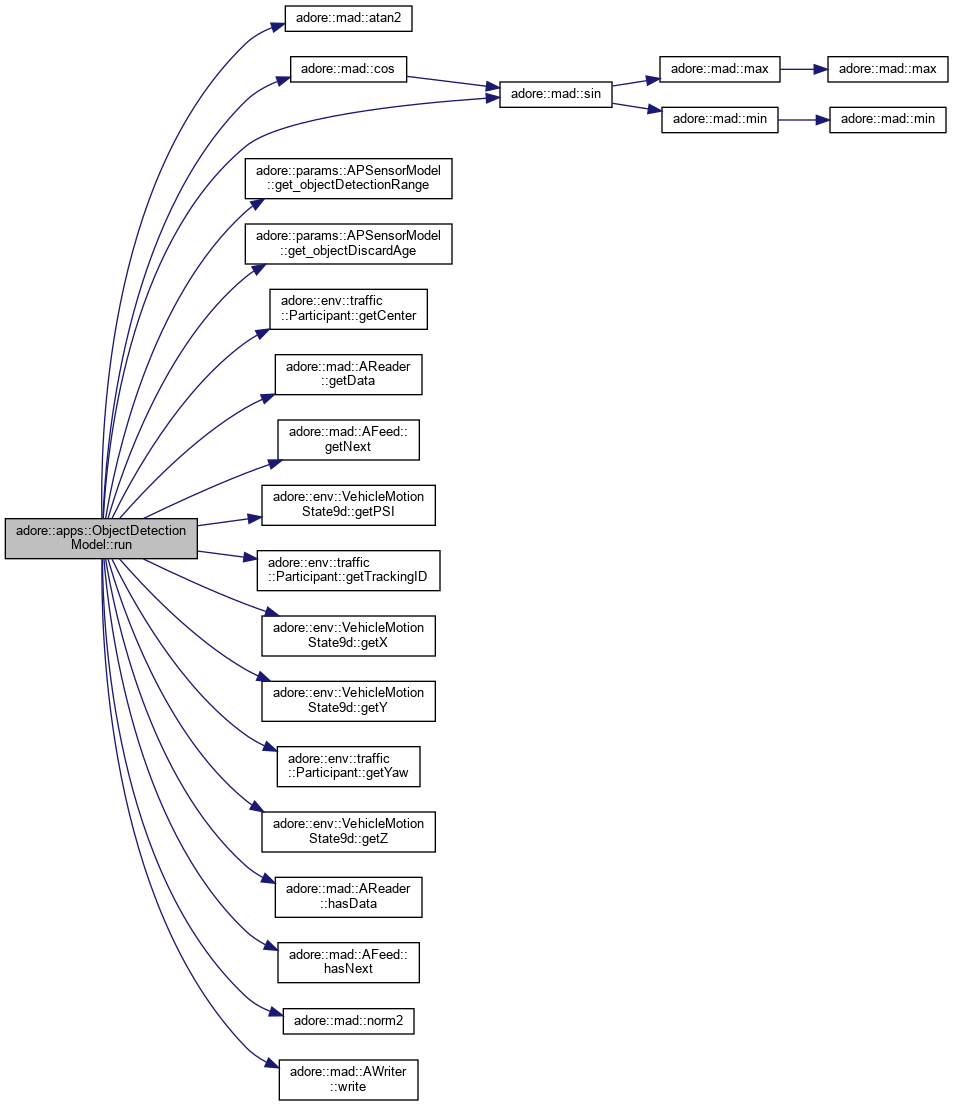
| virtual void | run () |
| publish updates on the detection of traffic participants More... | |
Private Attributes | |
| int | simulationID_ |
| adoreMatrix< double, 3, 1 > | ego_location_ |
| adore::sim::AFactory::TParticipantFeed * | participant_feed_ |
| adore::sim::AFactory::TParticipantSetWriter * | participant_set_writer_ |
| std::unordered_map< int, adore::env::traffic::Participant > | latest_data_ |
| adore::mad::AReader< double > * | timer_ |
| adore::params::APSensorModel * | psensor_model_ |
| adore::env::AFactory::TVehicleMotionStateReader * | localization_state_reader_ |
| adore::sim::AFactory::TVehicleMotionStateReader * | true_state_reader_ |
A simple model for sensor detection of traffic participants in the vehicle's vicinity
|
inline |
Constructor
| simulationID | id of vehicle in simulation, required to avoid detecting itself |
|
inlinevirtual |
publish updates on the detection of traffic participants
< range at which traffic is detected
< time after which observations are discarded

|
private |
|
private |
< publishes list of traffic participant detections
|
private |
|
private |
< ego location for range filtering
|
private |
< retrieve state updates from all vehicles
|
private |
< timer is used for discarding old updates
|
private |
|
private |
< map contains latest updates on traffic participants, tracking id mapping to participant
|
private |