|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
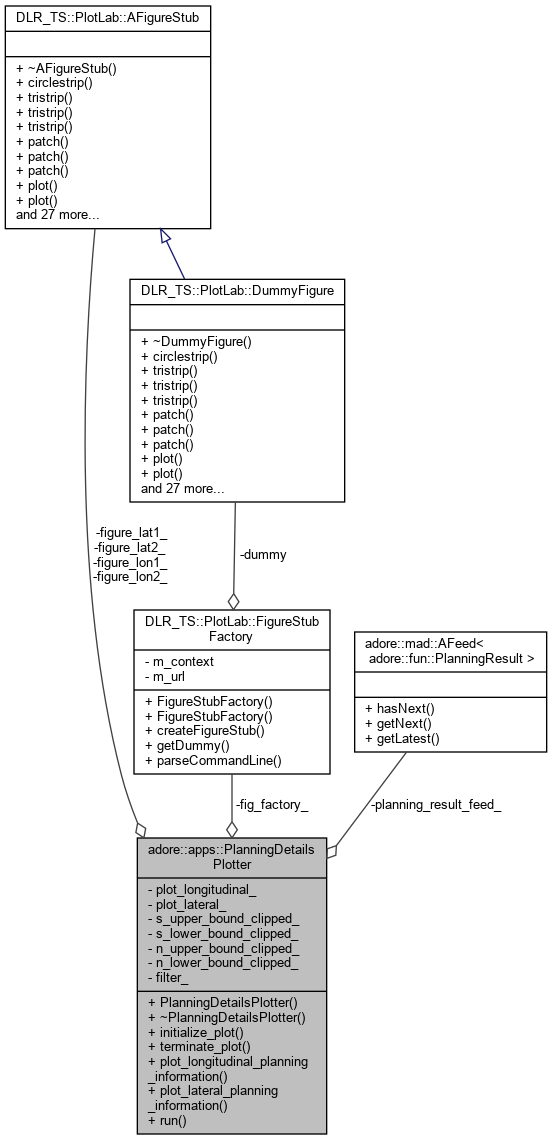
test bench implementation for minimum risk maneuver planner More...
#include <plot_planning_details.h>
Public Member Functions | |
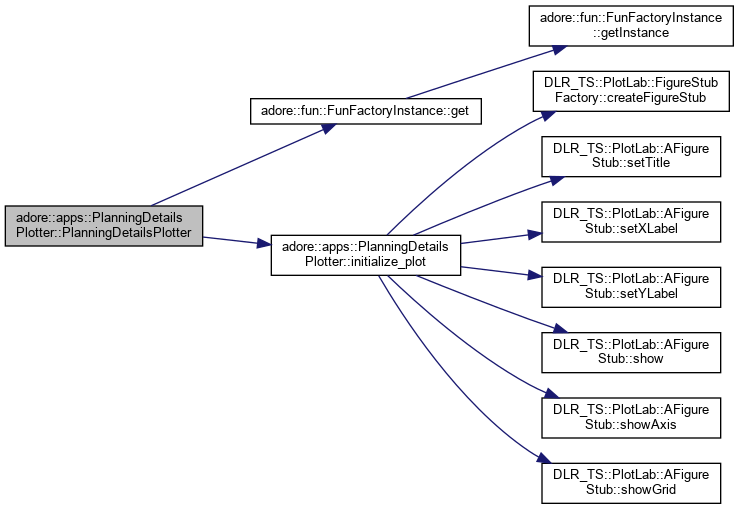
| PlanningDetailsPlotter (std::string filter="") | |
| ~PlanningDetailsPlotter () | |
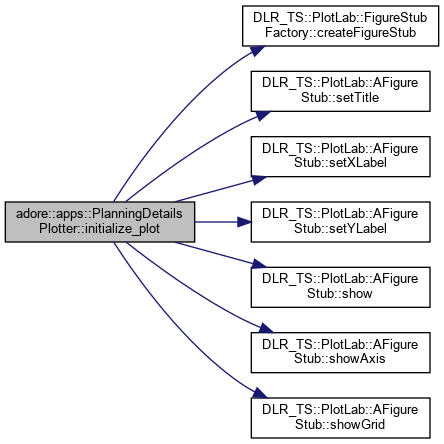
| void | initialize_plot () |
| void | terminate_plot () |
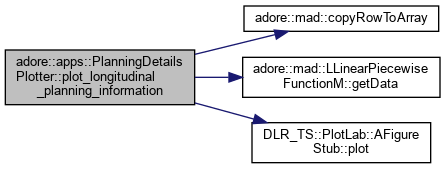
| void | plot_longitudinal_planning_information (fun::PlanningResult &planning_result) |
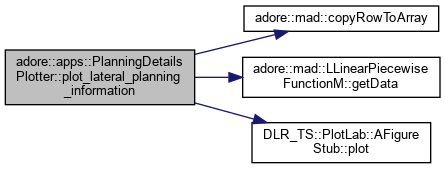
| void | plot_lateral_planning_information (fun::PlanningResult &planning_result) |
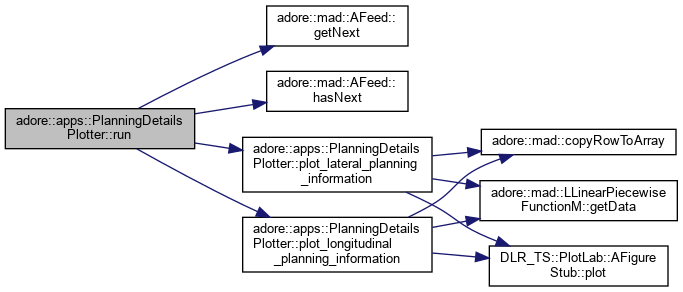
| void | run () |
Private Attributes | |
| bool | plot_longitudinal_ |
| bool | plot_lateral_ |
| double | s_upper_bound_clipped_ |
| double | s_lower_bound_clipped_ |
| double | n_upper_bound_clipped_ |
| double | n_lower_bound_clipped_ |
| std::string | filter_ |
| DLR_TS::PlotLab::FigureStubFactory * | fig_factory_ |
| DLR_TS::PlotLab::AFigureStub * | figure_lon1_ |
| DLR_TS::PlotLab::AFigureStub * | figure_lon2_ |
| DLR_TS::PlotLab::AFigureStub * | figure_lat1_ |
| DLR_TS::PlotLab::AFigureStub * | figure_lat2_ |
| adore::mad::AFeed< adore::fun::PlanningResult > * | planning_result_feed_ |
test bench implementation for minimum risk maneuver planner
|
inline |
|
inline |

|
inline |

|
inline |

|
inline |

|
inline |

|
inline |

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |