#include <planning_result.h>
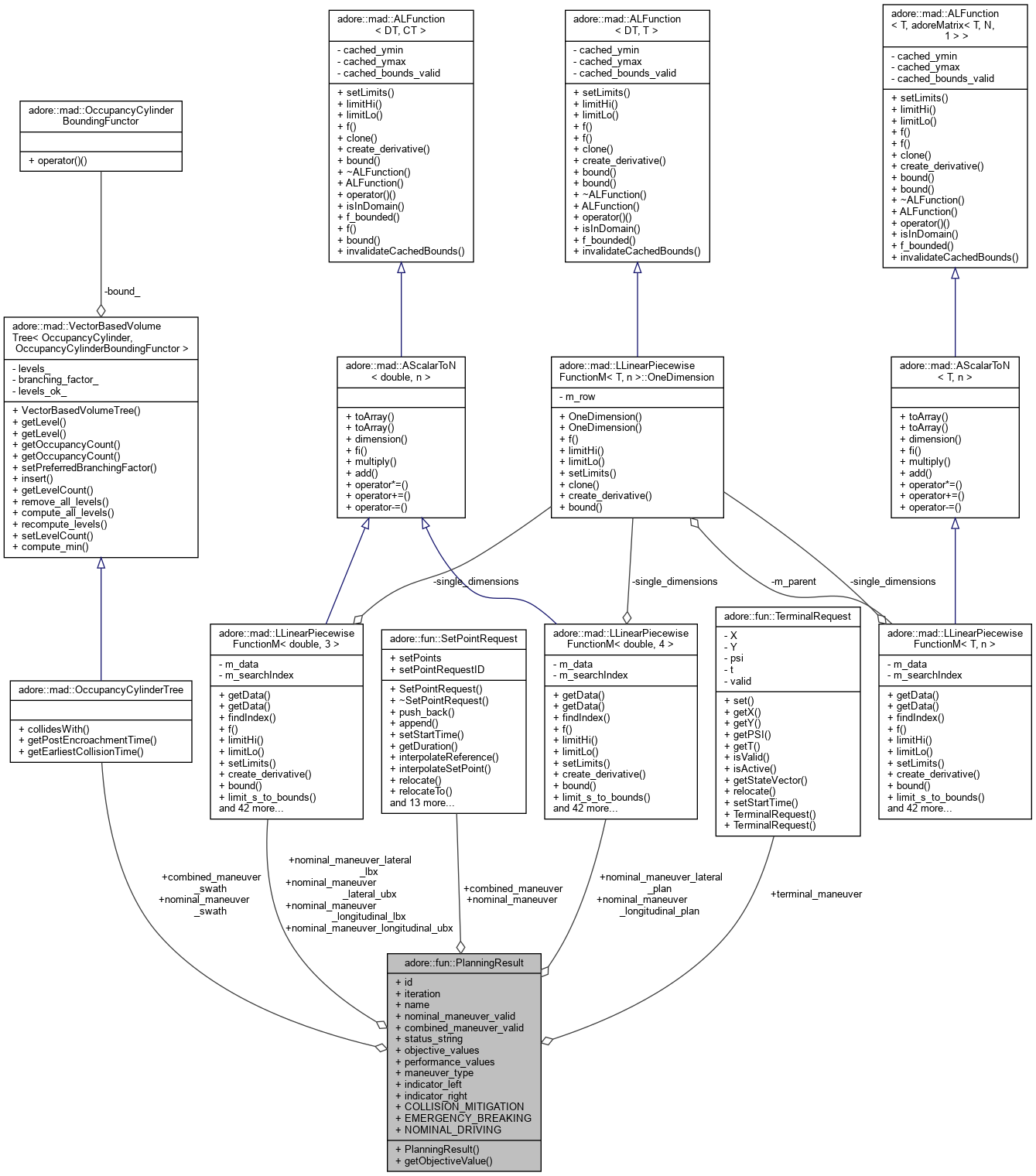
PlanningResult describes result of the planning process for a single maneuver in detail.
◆ PlanningResult()
| adore::fun::PlanningResult::PlanningResult |
( |
| ) |
|
|
inline |
◆ getObjectiveValue()
| double adore::fun::PlanningResult::getObjectiveValue |
( |
std::string |
name, |
|
|
double |
bound |
|
) |
| |
|
inline |
- Returns
- objective value corresponding to objective name, if entry exists. Otherwise return bound.
◆ COLLISION_MITIGATION
| const int adore::fun::PlanningResult::COLLISION_MITIGATION = 0 |
|
static |
◆ combined_maneuver
combined maneuver starting with nominal_maneuver and transitioning to emergency_maneuver ending in safe state
◆ combined_maneuver_swath
space-time volume expected to be covered by combined_maneuver
◆ combined_maneuver_valid
| bool adore::fun::PlanningResult::combined_maneuver_valid |
◆ EMERGENCY_BREAKING
| const int adore::fun::PlanningResult::EMERGENCY_BREAKING = 1 |
|
static |
◆ id
| int adore::fun::PlanningResult::id |
◆ indicator_left
| bool adore::fun::PlanningResult::indicator_left |
◆ indicator_right
| bool adore::fun::PlanningResult::indicator_right |
◆ iteration
| int adore::fun::PlanningResult::iteration |
determines to which planning iteration the planning result contributes
◆ maneuver_type
| int adore::fun::PlanningResult::maneuver_type |
◆ name
| std::string adore::fun::PlanningResult::name |
human-readable identifier for or type of maneuver, e.g. "lane following"
◆ NOMINAL_DRIVING
| const int adore::fun::PlanningResult::NOMINAL_DRIVING = 2 |
|
static |
◆ nominal_maneuver
the nominal maneuver optimzed towards horizon: not to be executed but rather for HMI and decision making
◆ nominal_maneuver_lateral_lbx
lower bounds for planning dim 0: t; dim 1: n; dim 2: dn; dim 3: ddn
◆ nominal_maneuver_lateral_plan
dim 0: t; dim 1: n; dim 2: dn; dim 3: ddn
◆ nominal_maneuver_lateral_ubx
upper bounds for planning dim 0: t; dim 1: n; dim 2: dn; dim 3: ddn
◆ nominal_maneuver_longitudinal_lbx
lower bounds for planning dim 0: t; dim 1: s; dim 2: ds; dim 3: dds
◆ nominal_maneuver_longitudinal_plan
dim 0: t; dim 1: s; dim 2: ds; dim 3: dds
◆ nominal_maneuver_longitudinal_ubx
upper bounds for planning dim 0: t; dim 1: s; dim 2: ds; dim 3: dds
◆ nominal_maneuver_swath
space-time volume expected to be covered by nominal_maneuver
◆ nominal_maneuver_valid
| bool adore::fun::PlanningResult::nominal_maneuver_valid |
◆ objective_values
| std::unordered_map<std::string, double> adore::fun::PlanningResult::objective_values |
set of individual objective values, to be weighted by decision making. e.g. acceleration, jerk, time-loss/navigation-cost
◆ performance_values
| std::unordered_map<std::string, double> adore::fun::PlanningResult::performance_values |
cpu-time measurements, etc.
◆ status_string
| std::string adore::fun::PlanningResult::status_string |
string explaining for example why constraint evaluation failed, e.g. "collision with prediction of object 17, branch 3, at t=0.58" or "I/O lin
inversion fail"
◆ terminal_maneuver
full-break/standstill after execution of combined maneuver
The documentation for this struct was generated from the following file:
- /home/fascar/temp/adore/libadore/libadore/adore/fun/include/adore/fun/tac/planning_result.h