|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <occupancycylinder.h>
Classes | |
| struct | EarliestOverlapFunctor |
| struct | TimeEncroachmentFunctor |
| struct | XYIntrusionFunctor |
Public Member Functions | |
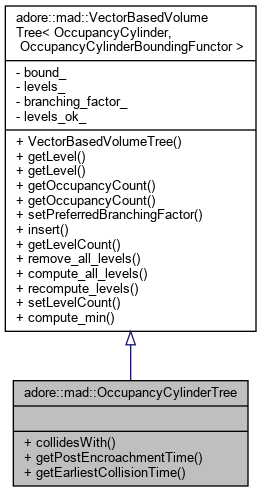
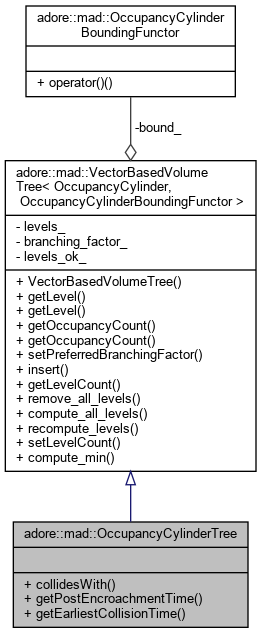
| bool | collidesWith (const OccupancyCylinderTree &other) const |
| bool | getPostEncroachmentTime (const OccupancyCylinderTree &other, double max_time, double &result) const |
| bool | getEarliestCollisionTime (const OccupancyCylinderTree &other, double max_time, double &result) const |
 Public Member Functions inherited from adore::mad::VectorBasedVolumeTree< OccupancyCylinder, OccupancyCylinderBoundingFunctor > Public Member Functions inherited from adore::mad::VectorBasedVolumeTree< OccupancyCylinder, OccupancyCylinderBoundingFunctor > | |
| VectorBasedVolumeTree () | |
| VolumeVector & | getLevel (int i) |
| const VolumeVector & | getLevel (int i) const |
| int | getOccupancyCount () |
| const int | getOccupancyCount () const |
| void | setPreferredBranchingFactor (int f) |
| void | insert (const OccupancyCylinder &volume) |
| int | getLevelCount () const |
| void | remove_all_levels () |
| void | compute_all_levels () |
| void | recompute_levels () |
| void | setLevelCount (int count) |
| bool | compute_min (const VectorBasedVolumeTree< OtherVolumeType, OtherFunctorType > &other, double cutoff, double &result_value, const MetricFunctor &f) const |
Additional Inherited Members | |
| Public Types inherited from adore::mad::VectorBasedVolumeTree< OccupancyCylinder, OccupancyCylinderBoundingFunctor > | |
| typedef std::pair< std::pair< int, int >, OccupancyCylinder > | IndexedVolumeType |
| typedef std::vector< IndexedVolumeType > | VolumeVector |
|
inline |
evaluates, whether the two objects overlap in x,y and z at a certain point of time


|
inline |
evaluates the earliest collision time
| max_time | maximum time until which to evaluate |
| result | contains earliest collision time, if overlap occured |

|
inline |
evaluates the post-encroachment time between two objects, if their xyz projections overlap
| max_time | maximum time until which to evaluate |
| result | contains postencroachmenttime, if overlap occured |

