|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <setpointrequest.h>
Public Member Functions | |
| SetPointRequest () | |
| virtual | ~SetPointRequest () |
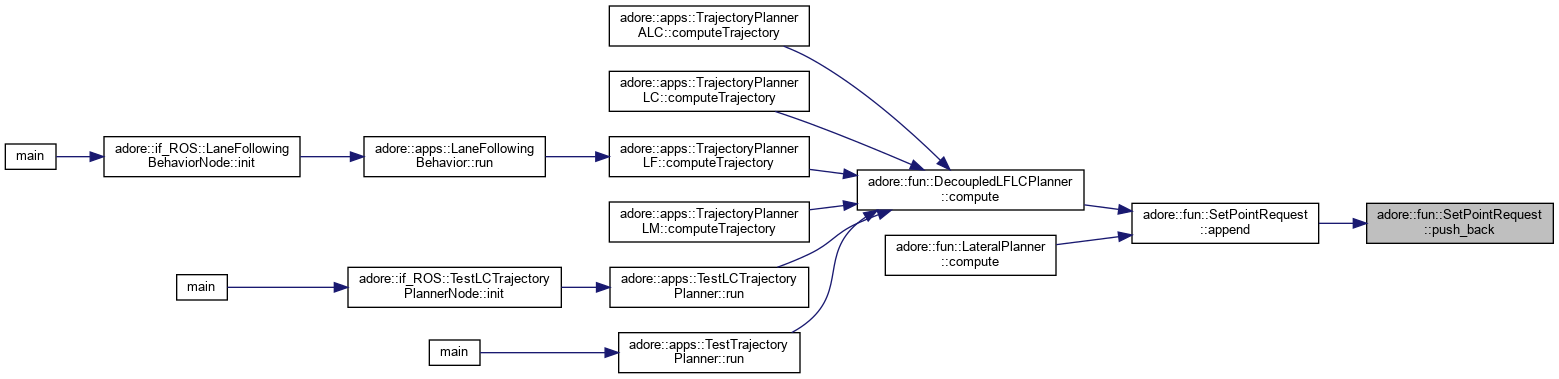
| void | push_back (const SetPoint &setPoint) |
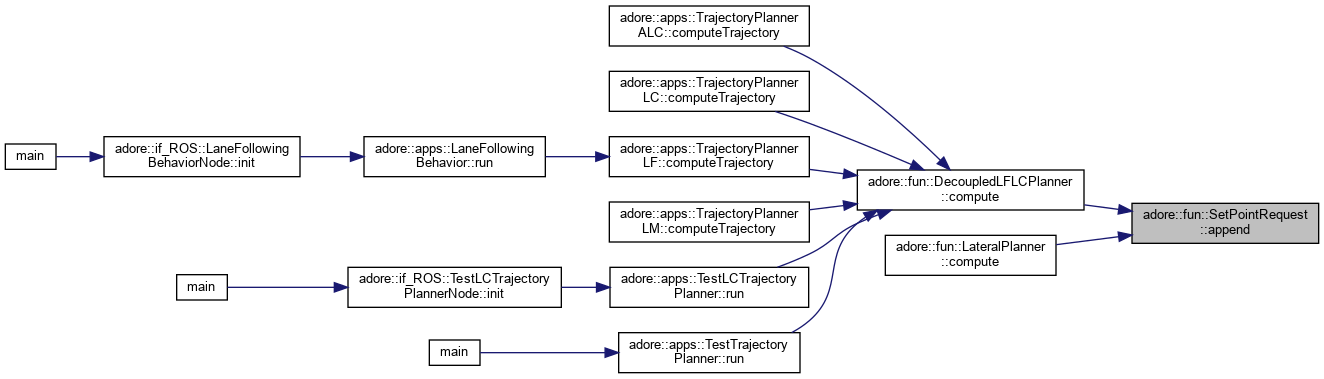
| void | append (const adoreMatrix< double, 1, 0 > &T, const adoreMatrix< double, 0, 0 > &X, int N, int maneuverID=0) |
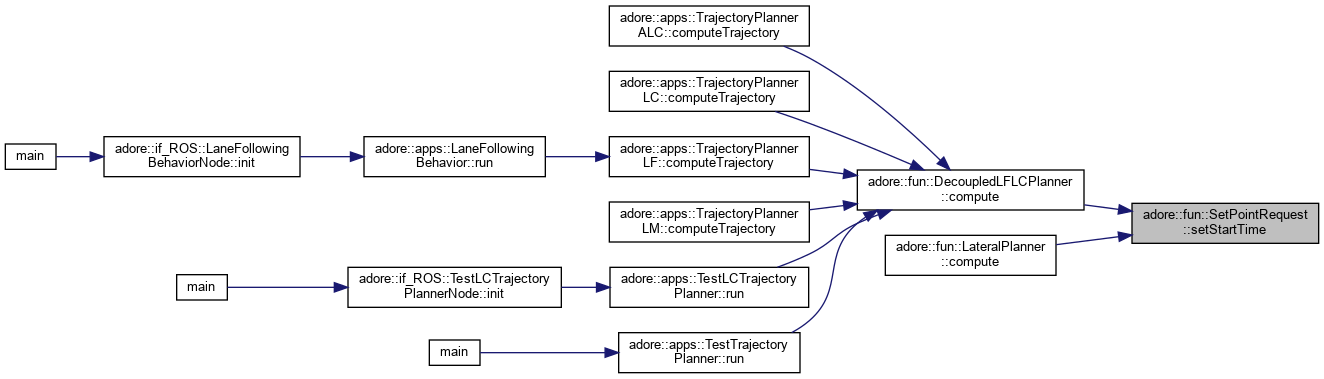
| void | setStartTime (double new_t0) |
| double | getDuration () const |
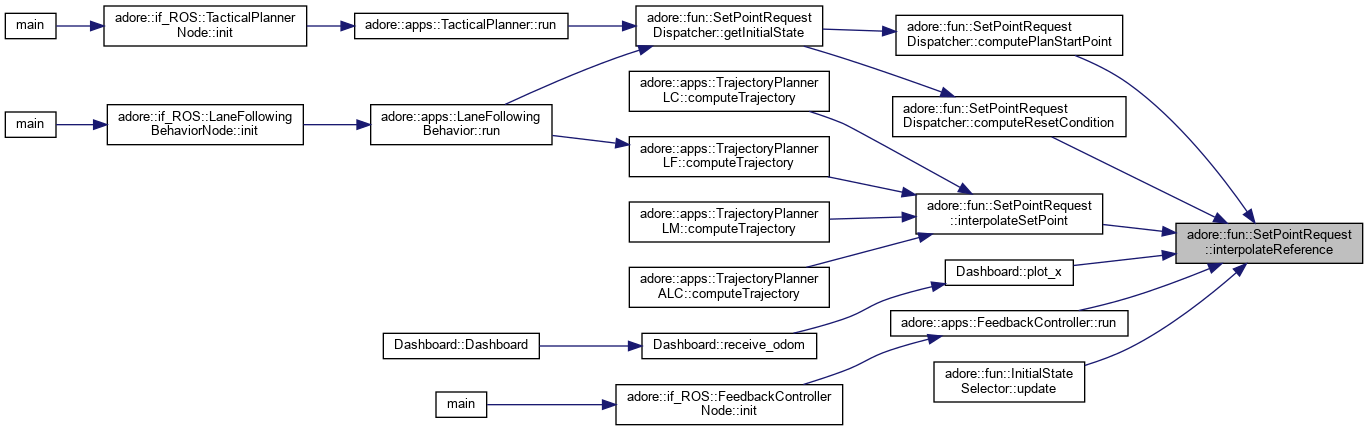
| PlanarVehicleState10d | interpolateReference (double t, adore::params::APVehicle *p) const |
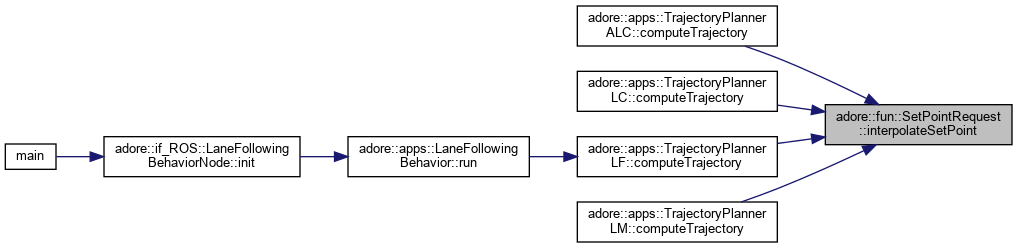
| SetPoint | interpolateSetPoint (double t, adore::params::APVehicle *p) const |
| void | relocate (double deltaX, double deltaY, double new_PSI0) |
| void | relocateTo (double newX0, double newY0, double new_PSI0) |
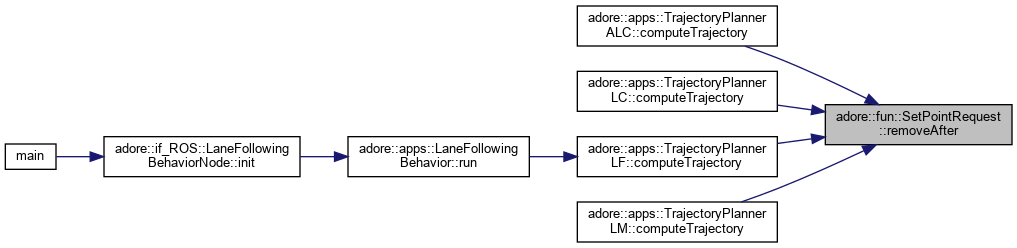
| void | removeAfter (double t) |
| int | numberOfDistinctManeuvers () |
| void | compress (int targetCount) |
| void | copySetPointInterval (double t0, double t1, SetPointRequest &destination) const |
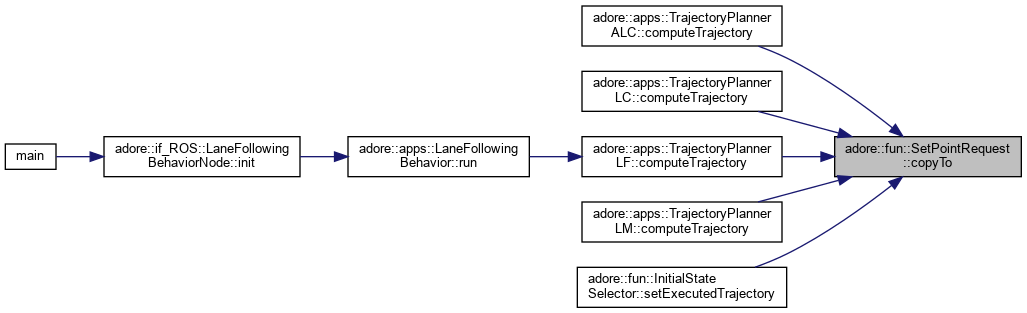
| void | copyTo (SetPointRequest &destination) const |
| void | copySetPointInterval (double t0, double t1, SetPointRequest &destination, int maneuverID) const |
| void | copyTo (SetPointRequest &destination, int maneuverID) const |
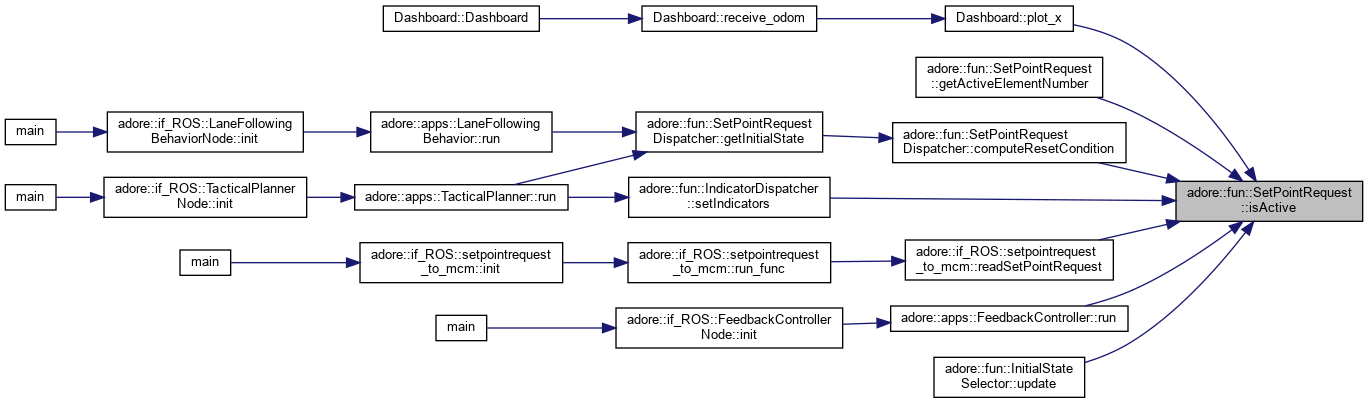
| bool | isActive (double t) const |
| bool | isPending (double t) const |
| bool | isDone (double t) const |
| int | getActiveElementNumber (double t) const |
| adore::mad::LLinearPiecewiseFunctionM< double, 4 > | getTrajectory () |
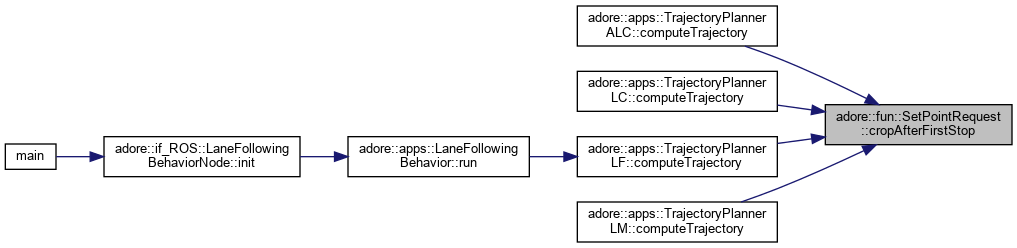
| void | cropAfterFirstStop (double vxslow) |
| remove SetPoints after first stop Method looks for first downward zero crossing of vx and removes all SetPoints at zero crossing and after. More... | |
Public Attributes | |
| std::vector< SetPoint > | setPoints |
| int | setPointRequestID |
A description of a reference trajectory. Consisting of a queue of SetPoints, SetPointRequest defines the reference vehicle behavior during a longer time interval consisting of the sub-intervals of separate SetPoints.
|
inline |
|
inlinevirtual |
|
inline |
Add N new SetPoints to the end of the trajectory. Data for new SetPoints is retrieved from a state matrix.
| T | time steps |
| X | state matrix of size #x * #T |
| N | number of SetPoints to be appended, step size is changed accordingly |
| maneuverID | maneuver type |

|
inline |
resize the spr to the desired number of setpoints

|
inline |
copy a SetPoints in a given time interval to a destination SetPointRequest
|
inline |
copy a SetPoints in a given time interval to a destination SetPointRequest and change their maneuverID
|
inline |
|
inline |
copy all SetPoints to a destionation SetPointRequest
|
inline |
remove SetPoints after first stop Method looks for first downward zero crossing of vx and removes all SetPoints at zero crossing and after.
| vxslow | terminal speed, defining the zero line for which zero crossing is detected |
|
inline |
|
inline |
|
inline |
Convert SetPointRequest to a state matrix representation with states [X,Y,PSI,vx].

|
inline |
Retrieve the reference vehicle state for an exact time t. In the general case t is located between discrete time steps. The reference is then interpolated by forwards integration.
| t | the desired point of time |
| p | vehicle parameters used for forwards integration |

|
inline |

|
inline |
|
inline |
test whether SetPointRequest ends before time t
|
inline |
test whether SetPointRequest has a reference for time t or starts after time t
|
inline |
count the number of distinct maneuver ids

|
inline |
|
inline |
Rotate and translate the reference trajectory to another initial position.
| deltaX | the shift by X coordinate |
| deltaY | the shift by Y coordinate |
| new_PSI0 | the new initial heading/direction |
q = R(psi)(p-p0)+p1

|
inline |
Rotate and translate the reference trajectory to another initial position.
| newX0 | the new origin X coordinate |
| newY0 | the new origin Y coordinate |
| new_PSI0 | the new initial heading/direction |


|
inline |
Remove entries after a certain point of time
| t | maximum time to be contained |
|
inline |
shift the reference trajectory in time
| new_t0 | the new start time |
| int adore::fun::SetPointRequest::setPointRequestID |
id of reference trajectory, incremented with each update to track changes
| std::vector<SetPoint> adore::fun::SetPointRequest::setPoints |
SetPoints, ordered by time