|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <setpoint.h>
Public Member Functions | |
| SetPoint () | |
| virtual | ~SetPoint () |
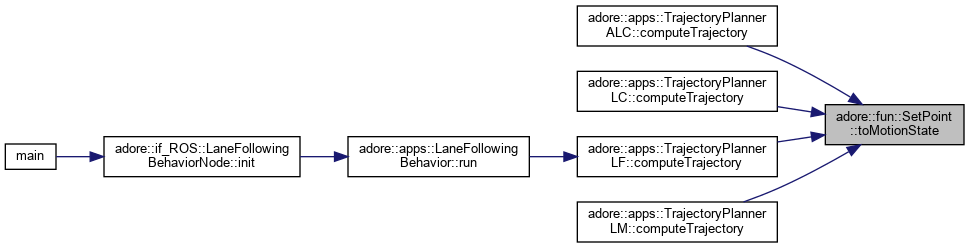
| VehicleMotionState9d | toMotionState () const |
Public Attributes | |
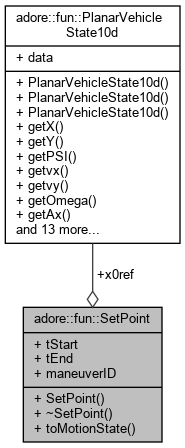
| PlanarVehicleState10d | x0ref |
| double | tStart |
| double | tEnd |
| int | maneuverID |
A single reference point for the vehicle. The SetPoint is valid during a time interval [tStart,tEnd]. The reference state is given for tStart. The desired state at any other time t in [tStart,tEnd] can be attained by forwards integration of x0ref.
|
inline |
|
inlinevirtual |
|
inline |
| int adore::fun::SetPoint::maneuverID |
ID of the maneuver issuing the SetPoint
| double adore::fun::SetPoint::tEnd |
End of validity of the SetPoint
| double adore::fun::SetPoint::tStart |
Point of time at which x0ref should be attained.
| PlanarVehicleState10d adore::fun::SetPoint::x0ref |
reference vehicle state