|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <terminalrequest.h>
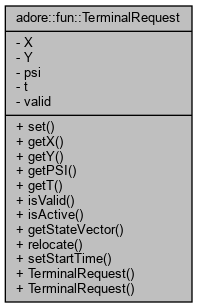
Public Member Functions | |
| void | set (double X, double Y, double psi, double t, bool valid) |
| double | getX () const |
| double | getY () const |
| double | getPSI () const |
| double | getT () const |
| bool | isValid () const |
| bool | isActive (double t) const |
| adoreMatrix< double, 3, 1 > | getStateVector () const |
| void | relocate (double new_X0, double new_Y0, double new_PSI0) |
| void | setStartTime (double new_t0) |
| TerminalRequest () | |
| TerminalRequest (double X, double Y, double psi, double t, bool valid) | |
Private Attributes | |
| double | X |
| double | Y |
| double | psi |
| double | t |
| bool | valid |
Request the controller to attempt a stop of the vehicle at the specified postion with the specified heading. If the position can not be hit due to acceleration constraints, maximum deceleration shall be applied, while regulating the lateral error towards the line specified by (X,Y,psi).
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |

|
inline |
|
inline |
|
inline |
|
inline |

|
inline |
|
inline |

|
inline |
|
private |
|
private |
|
private |
|
private |
|
private |