|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
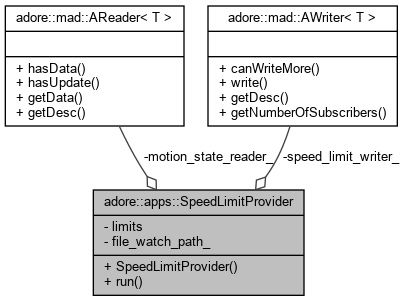
A node to gather speed limit data and provide it e.g. for laneview computation. More...
#include <speedlimit_provider.h>
Public Member Functions | |
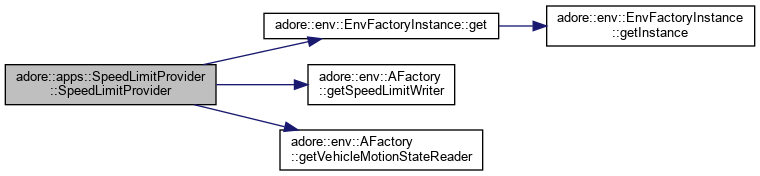
| SpeedLimitProvider (std::string file_watch_path) | |
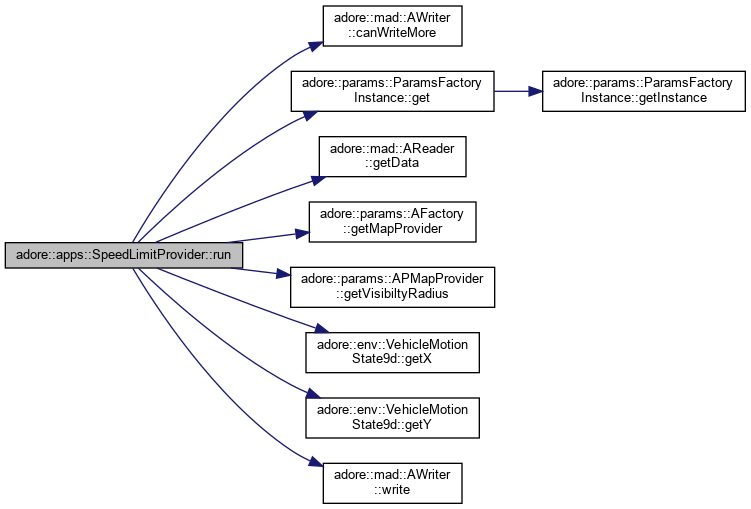
| void | run () |
A node to gather speed limit data and provide it e.g. for laneview computation.
|
inline |
|
inline |

|
private |
|
private |
|
private |
|
private |