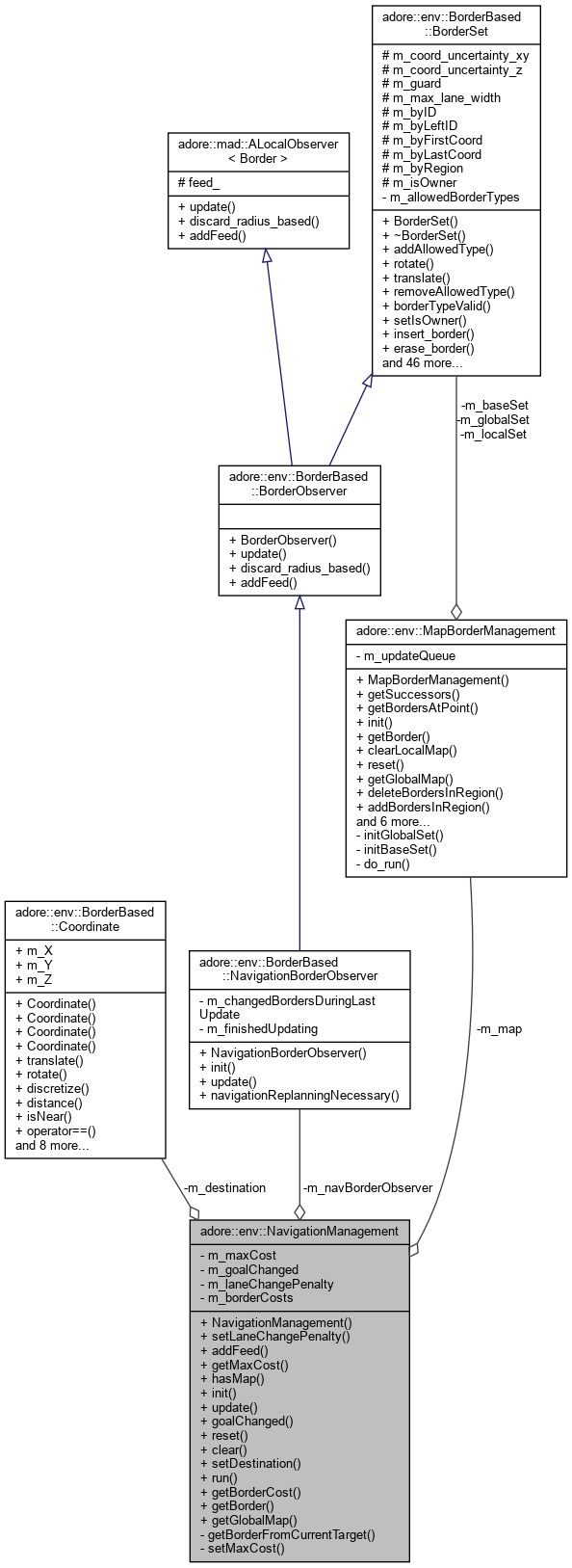
#include <navigation_management.h>
◆ NavigationManagement()
| adore::env::NavigationManagement::NavigationManagement |
( |
| ) |
|
|
inline |
◆ addFeed()
◆ clear()
| void adore::env::NavigationManagement::clear |
( |
| ) |
|
|
inline |
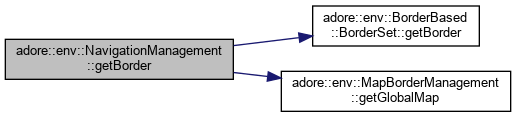
◆ getBorder()
◆ getBorderCost()
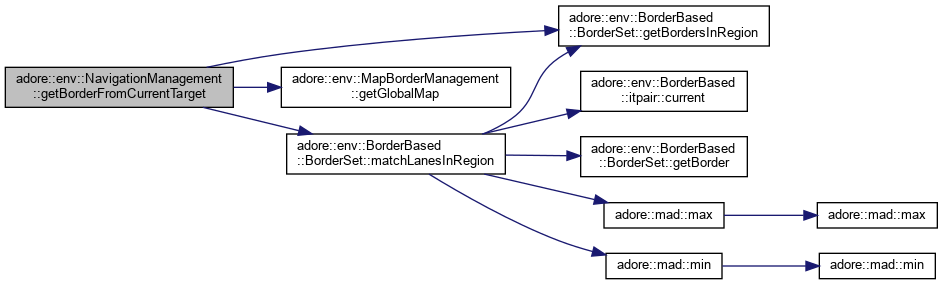
◆ getBorderFromCurrentTarget()
◆ getGlobalMap()
◆ getMaxCost()
| double adore::env::NavigationManagement::getMaxCost |
( |
| ) |
|
|
inline |
◆ goalChanged()
| bool adore::env::NavigationManagement::goalChanged |
( |
| ) |
|
|
inline |
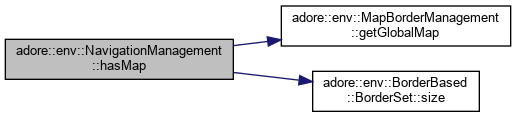
◆ hasMap()
| bool adore::env::NavigationManagement::hasMap |
( |
| ) |
|
|
inline |
◆ init()
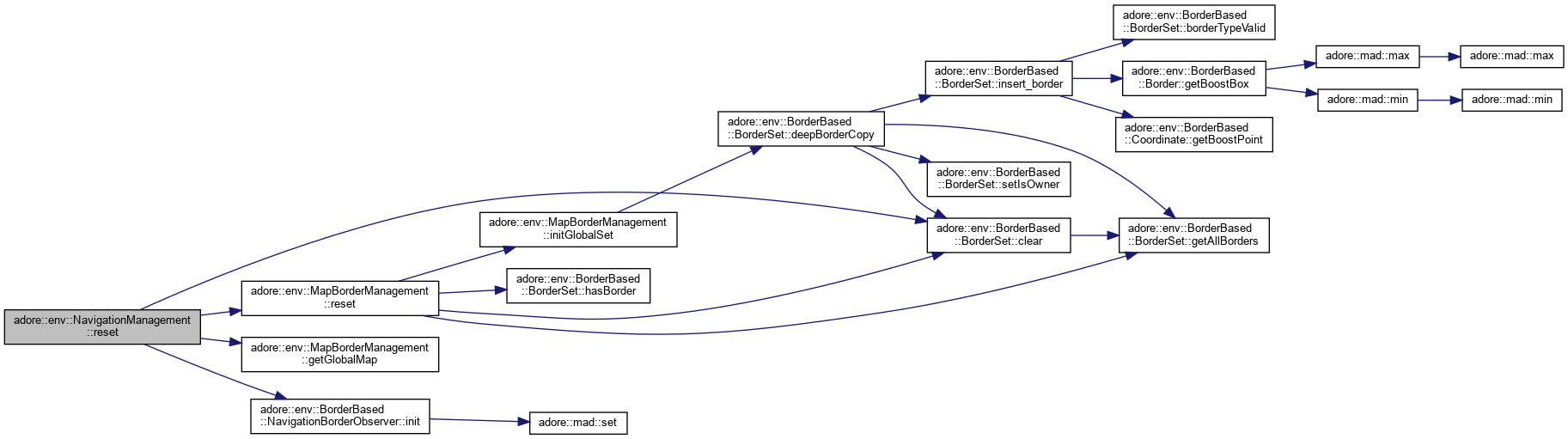
◆ reset()
| void adore::env::NavigationManagement::reset |
( |
| ) |
|
|
inline |
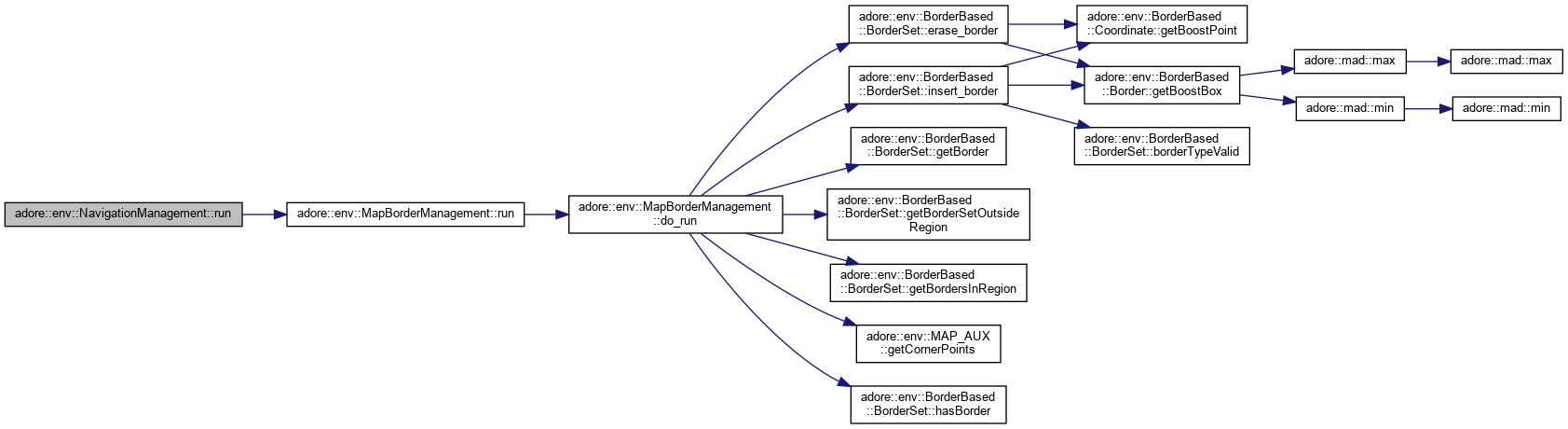
◆ run()
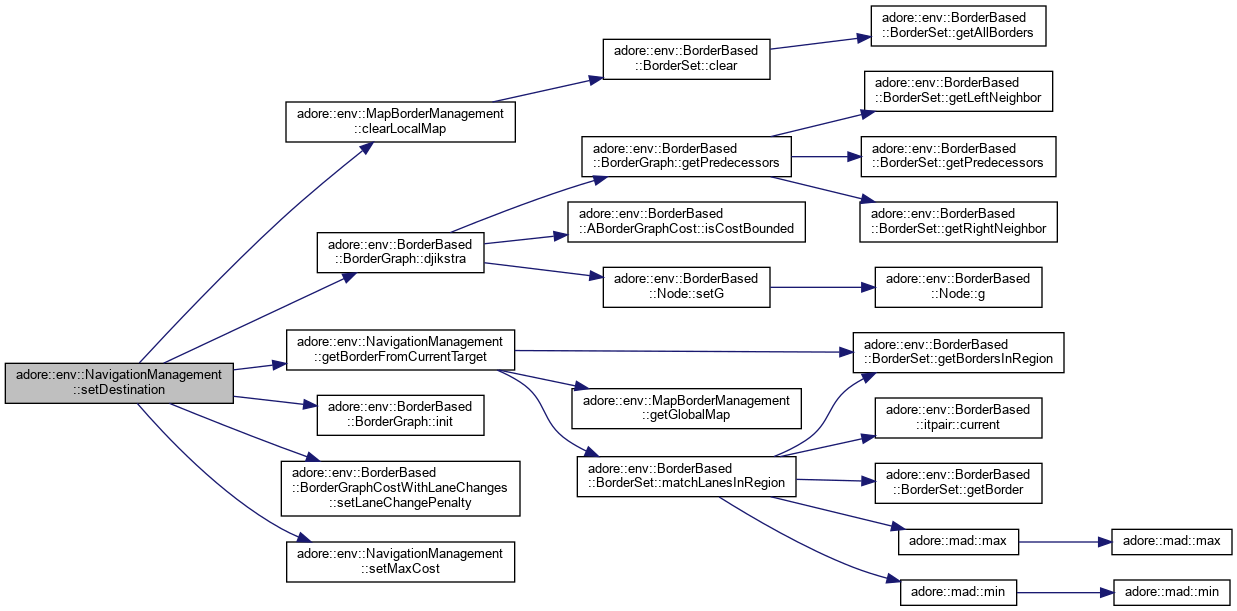
◆ setDestination()
◆ setLaneChangePenalty()
| void adore::env::NavigationManagement::setLaneChangePenalty |
( |
double |
value | ) |
|
|
inline |
◆ setMaxCost()
| void adore::env::NavigationManagement::setMaxCost |
( |
| ) |
|
|
inlineprivate |
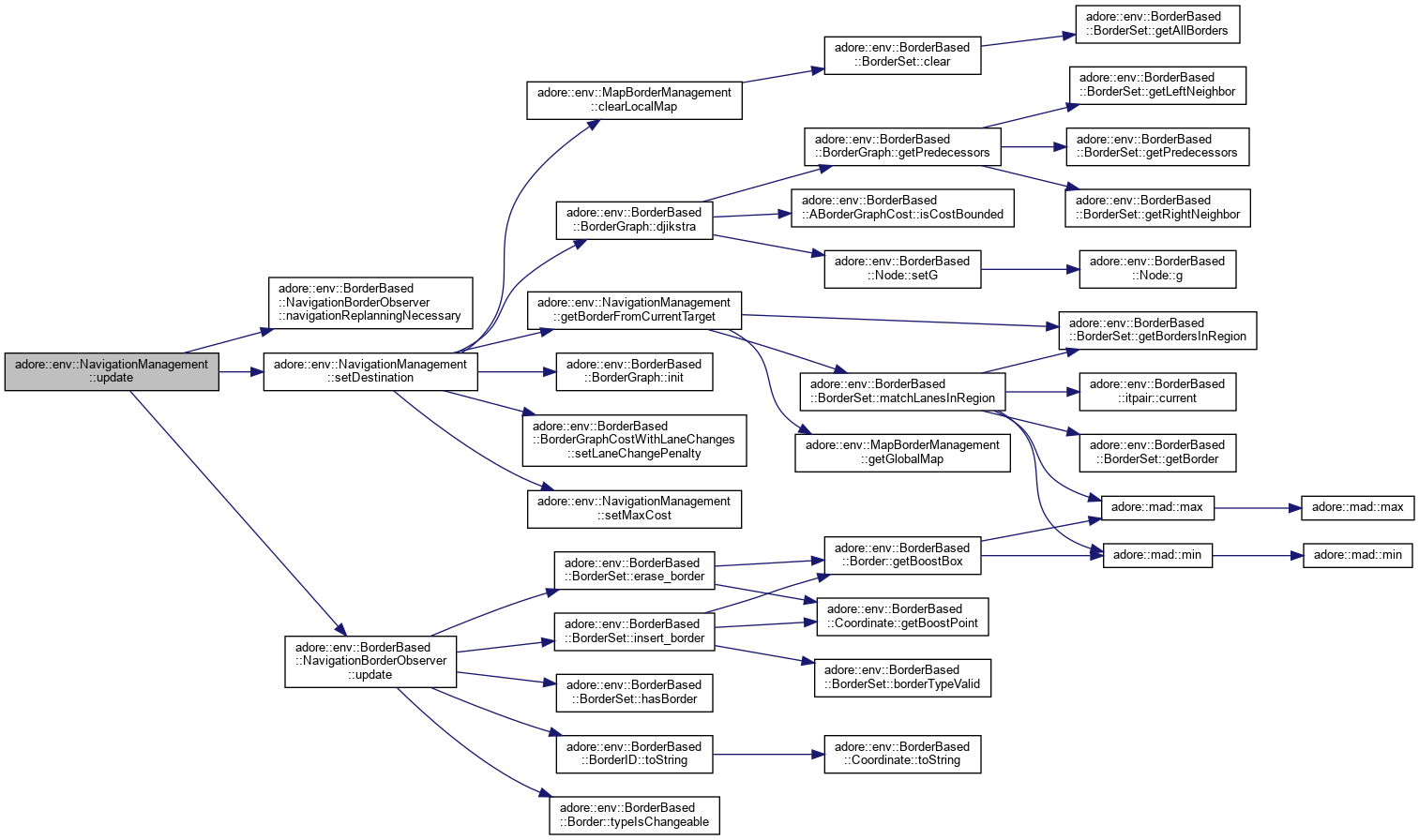
◆ update()
◆ m_borderCosts
◆ m_destination
◆ m_goalChanged
| bool adore::env::NavigationManagement::m_goalChanged |
|
private |
◆ m_laneChangePenalty
| double adore::env::NavigationManagement::m_laneChangePenalty |
|
private |
◆ m_map
◆ m_maxCost
| double adore::env::NavigationManagement::m_maxCost |
|
private |
◆ m_navBorderObserver
The documentation for this class was generated from the following file: