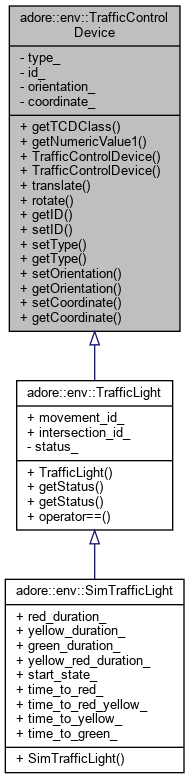
#include <trafficcontroldevice.h>
|
| enum | TCDType {
TRAFFIC_LIGHT = 0
, TRAFFIC_LIGHT_PEDESTRIAN = 1
, RIGHT_OF_WAY = 2
, STOP_SIGN = 3
,
SPEED_LIMIT_10 = 4
, SPEED_LIMIT_20 = 5
, SPEED_LIMIT_30 = 6
, SPEED_LIMIT_40 = 7
,
SPEED_LIMIT_50 = 8
, SPEED_LIMIT_60 = 9
, SPEED_LIMIT_70 = 10
, SPEED_LIMIT_80 = 11
,
SPEED_LIMIT_90 = 12
, SPEED_LIMIT_100 = 13
, SPEED_LIMIT_120 = 14
, SPEED_LIMIT_130 = 15
,
SPEED_LIMIT_NON = 16
, CITY_LIMIT_SIGN = 17
, MOTOR_WAY_SIGN = 18
, UNKNOWN = 99
} |
| |
| enum | TCDClass { C_TRAFFIC_LIGHT = 0
, C_PRECEDENCE = 1
, C_SPEED_LIMIT = 2
, C_UNKNOWN = 99
} |
| |
◆ TCDClass
| Enumerator |
|---|
| C_TRAFFIC_LIGHT | |
| C_PRECEDENCE | |
| C_SPEED_LIMIT | |
| C_UNKNOWN | |
◆ TCDType
| Enumerator |
|---|
| TRAFFIC_LIGHT | |
| TRAFFIC_LIGHT_PEDESTRIAN | |
| RIGHT_OF_WAY | |
| STOP_SIGN | |
| SPEED_LIMIT_10 | |
| SPEED_LIMIT_20 | |
| SPEED_LIMIT_30 | |
| SPEED_LIMIT_40 | |
| SPEED_LIMIT_50 | |
| SPEED_LIMIT_60 | |
| SPEED_LIMIT_70 | |
| SPEED_LIMIT_80 | |
| SPEED_LIMIT_90 | |
| SPEED_LIMIT_100 | |
| SPEED_LIMIT_120 | |
| SPEED_LIMIT_130 | |
| SPEED_LIMIT_NON | |
| CITY_LIMIT_SIGN | |
| MOTOR_WAY_SIGN | |
| UNKNOWN | |
◆ TrafficControlDevice() [1/2]
| adore::env::TrafficControlDevice::TrafficControlDevice |
( |
| ) |
|
|
inline |
◆ TrafficControlDevice() [2/2]
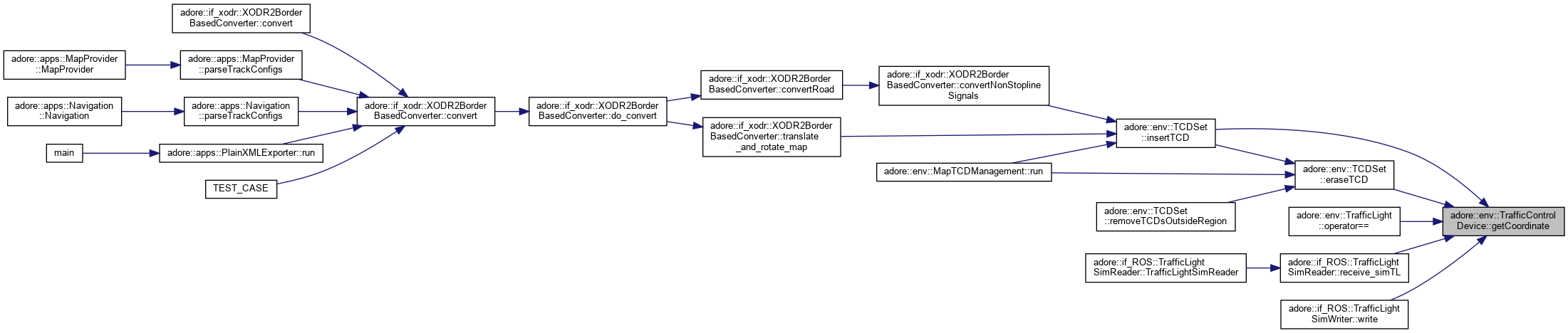
◆ getCoordinate()
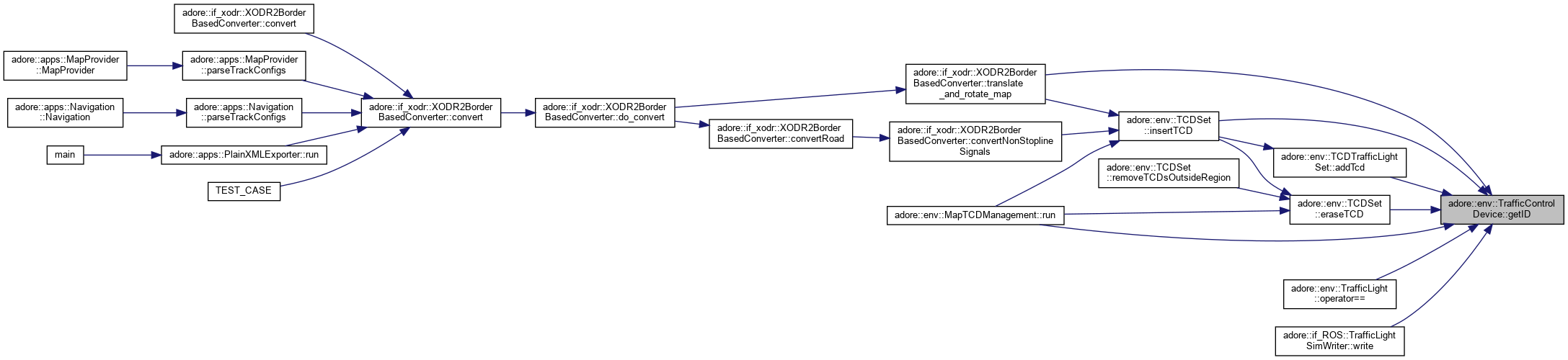
◆ getID()
| int adore::env::TrafficControlDevice::getID |
( |
| ) |
const |
|
inline |
◆ getNumericValue1()
| double adore::env::TrafficControlDevice::getNumericValue1 |
( |
| ) |
|
|
inline |
Some tcd's have one or more numeric value affixed to them, e.g. speed limits have one.
- Returns
- first numeric value
◆ getOrientation()
| double adore::env::TrafficControlDevice::getOrientation |
( |
| ) |
const |
|
inline |
◆ getTCDClass()
| TCDClass adore::env::TrafficControlDevice::getTCDClass |
( |
| ) |
|
|
inline |
generalization of tcd types
- Returns
- enum type value for tcd class: allows to treat similar types of tcds similarly.
◆ getType()
| TCDType adore::env::TrafficControlDevice::getType |
( |
| ) |
const |
|
inline |
◆ rotate()
| void adore::env::TrafficControlDevice::rotate |
( |
double |
angle, |
|
|
double |
x0 = 0, |
|
|
double |
y0 = 0 |
|
) |
| |
|
inline |
◆ setCoordinate()
◆ setID()
| void adore::env::TrafficControlDevice::setID |
( |
int |
id | ) |
|
|
inline |
◆ setOrientation()
| void adore::env::TrafficControlDevice::setOrientation |
( |
double |
orientation | ) |
|
|
inline |
◆ setType()
| void adore::env::TrafficControlDevice::setType |
( |
TCDType |
type | ) |
|
|
inline |
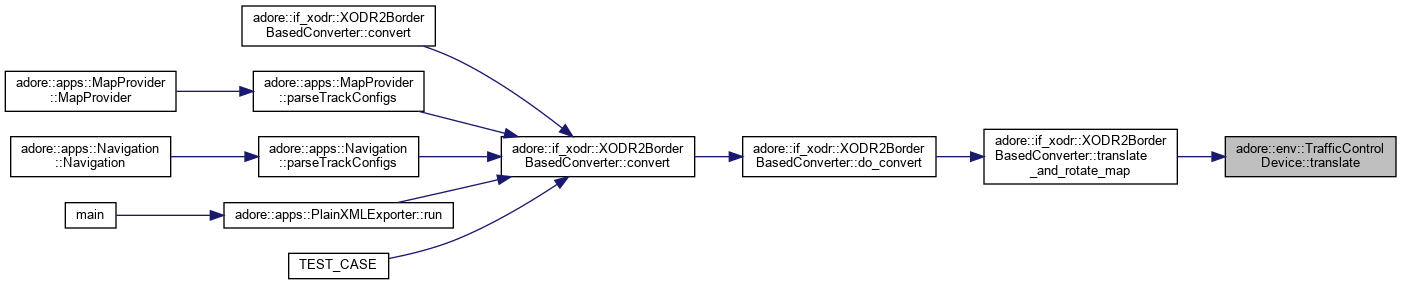
◆ translate()
| void adore::env::TrafficControlDevice::translate |
( |
double |
dx, |
|
|
double |
dy, |
|
|
double |
dz |
|
) |
| |
|
inline |
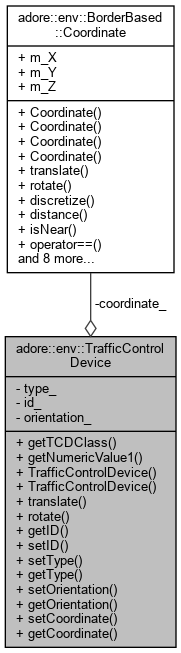
◆ coordinate_
◆ id_
| int adore::env::TrafficControlDevice::id_ |
|
private |
◆ orientation_
| double adore::env::TrafficControlDevice::orientation_ |
|
private |
◆ type_
| TCDType adore::env::TrafficControlDevice::type_ |
|
private |
The documentation for this class was generated from the following file: