#include <ros_com_patterns.h>
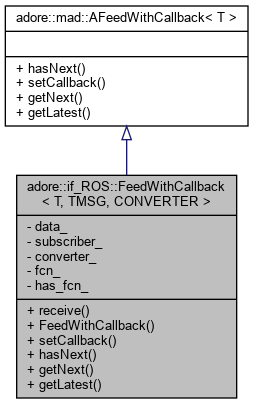
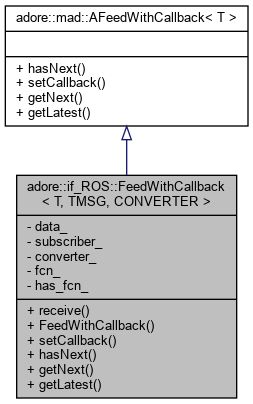
◆ FeedWithCallback()
template<class T , class TMSG , class CONVERTER >
◆ getLatest()
template<class T , class TMSG , class CONVERTER >
◆ getNext()
template<class T , class TMSG , class CONVERTER >
◆ hasNext()
template<class T , class TMSG , class CONVERTER >
◆ receive()
template<class T , class TMSG , class CONVERTER >
◆ setCallback()
template<class T , class TMSG , class CONVERTER >
◆ converter_
template<class T , class TMSG , class CONVERTER >
◆ data_
template<class T , class TMSG , class CONVERTER >
◆ fcn_
template<class T , class TMSG , class CONVERTER >
◆ has_fcn_
template<class T , class TMSG , class CONVERTER >
◆ subscriber_
template<class T , class TMSG , class CONVERTER >
The documentation for this class was generated from the following file: