|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
abstract class containing parameters related to configuring the lateral planner More...
#include <ap_lateral_planner.h>
Public Member Functions | |
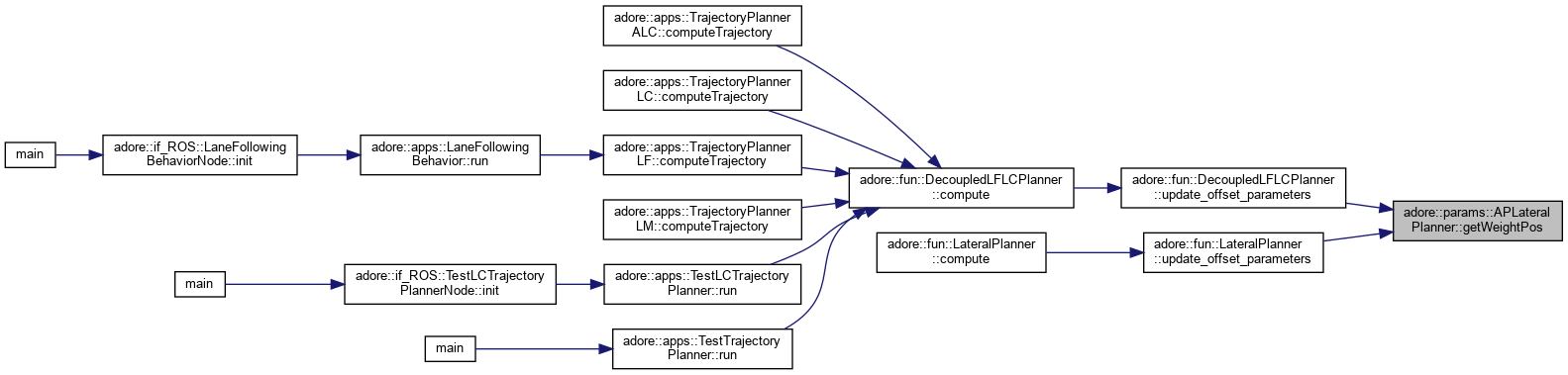
| virtual double | getWeightPos () const =0 |
| getWeightPos returns cost function weight for quadratic position error term More... | |
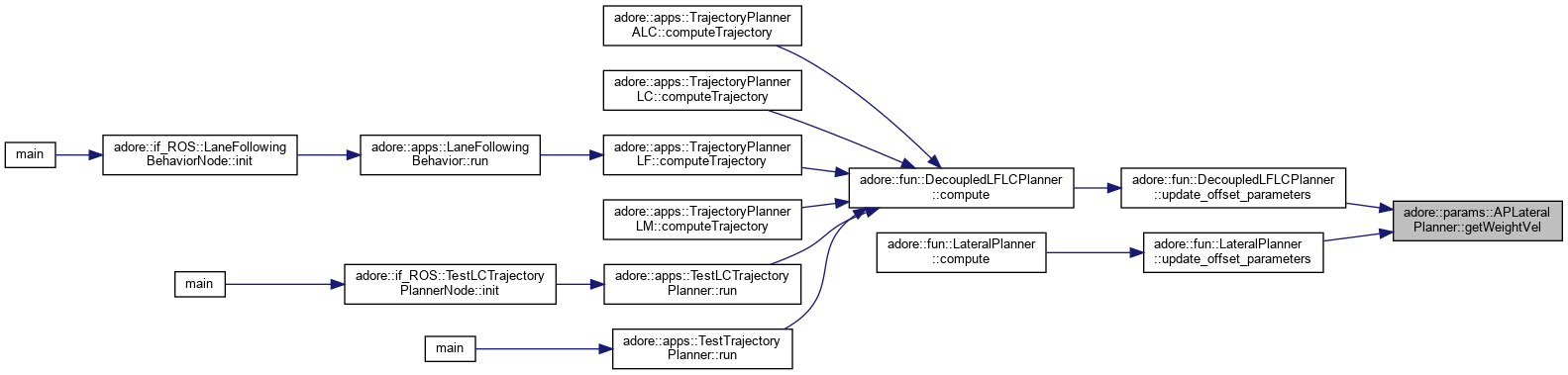
| virtual double | getWeightVel () const =0 |
| getWeightVel returns cost function weight for quadratic velocity error term More... | |
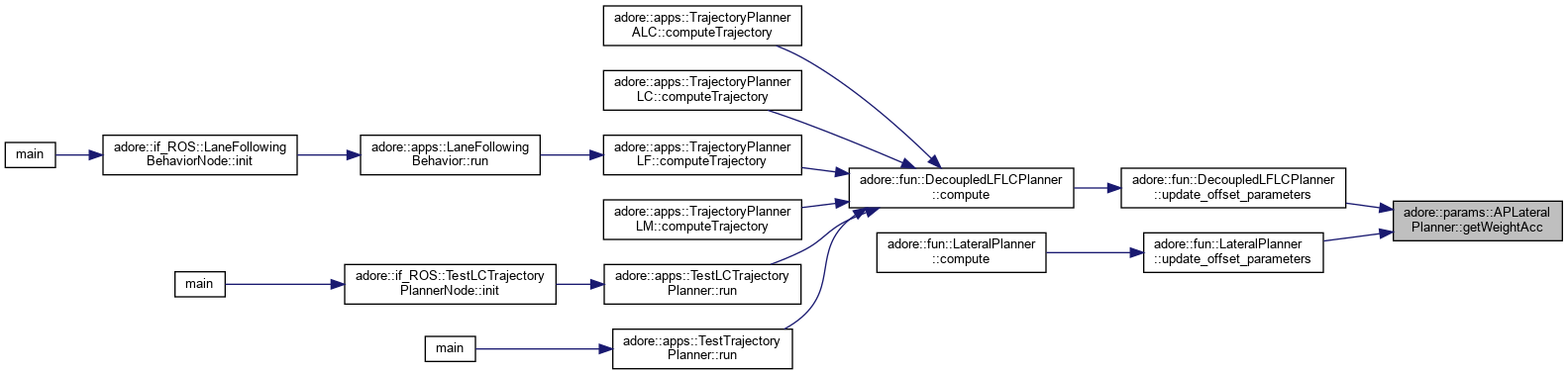
| virtual double | getWeightAcc () const =0 |
| getWeightAcc returns cost function weight for quadratic acceleration term More... | |
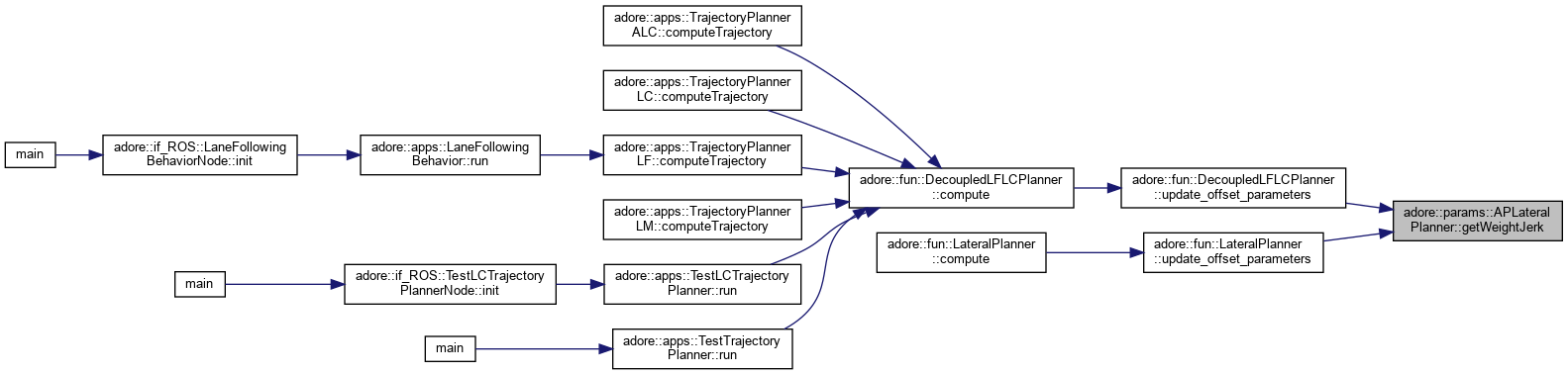
| virtual double | getWeightJerk () const =0 |
| getWeightJerk returns cost function weight for quadratic jerk term More... | |
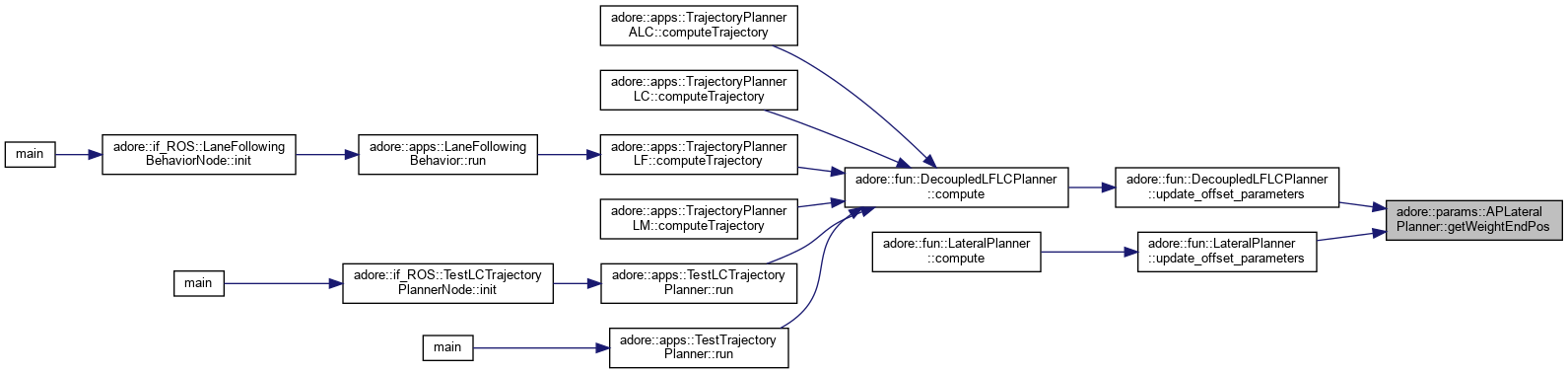
| virtual double | getWeightEndPos () const =0 |
| getWeightEndPos returns cost function weight for quadratic position error term at end point More... | |
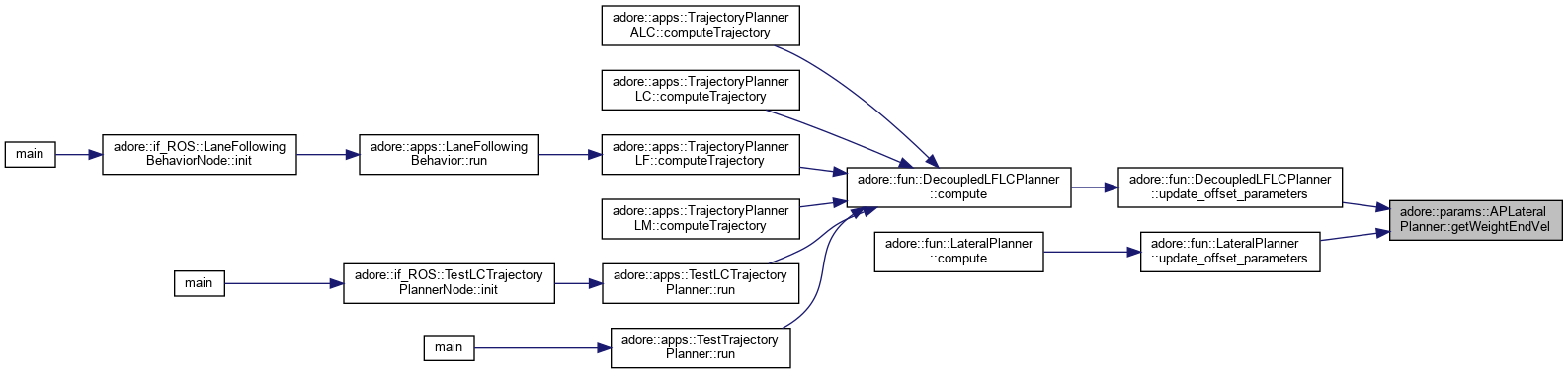
| virtual double | getWeightEndVel () const =0 |
| getWeightEndVel returns cost function weight for quadratic velocity error term at end point More... | |
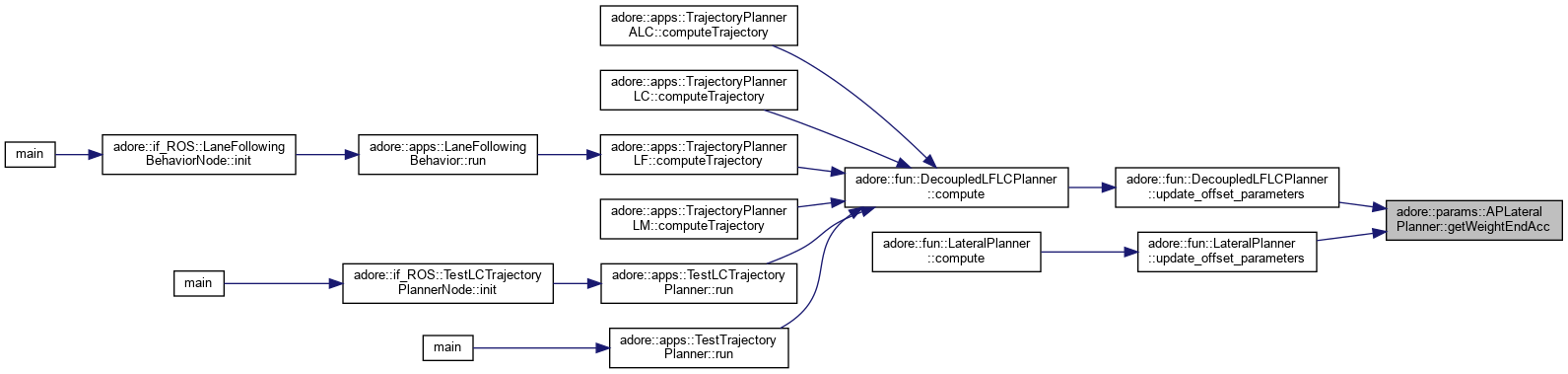
| virtual double | getWeightEndAcc () const =0 |
| getWeightEndAcc returns cost function weight for quadratic acceleration term at end point More... | |
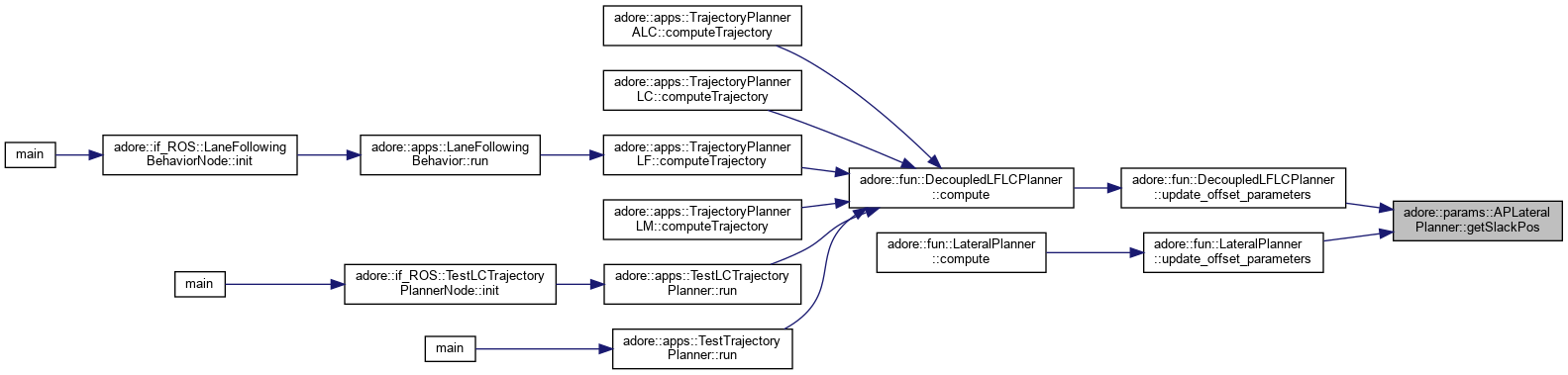
| virtual double | getSlackPos () const =0 |
| getSlackPos returns maximum slack of soft-constraints for position More... | |
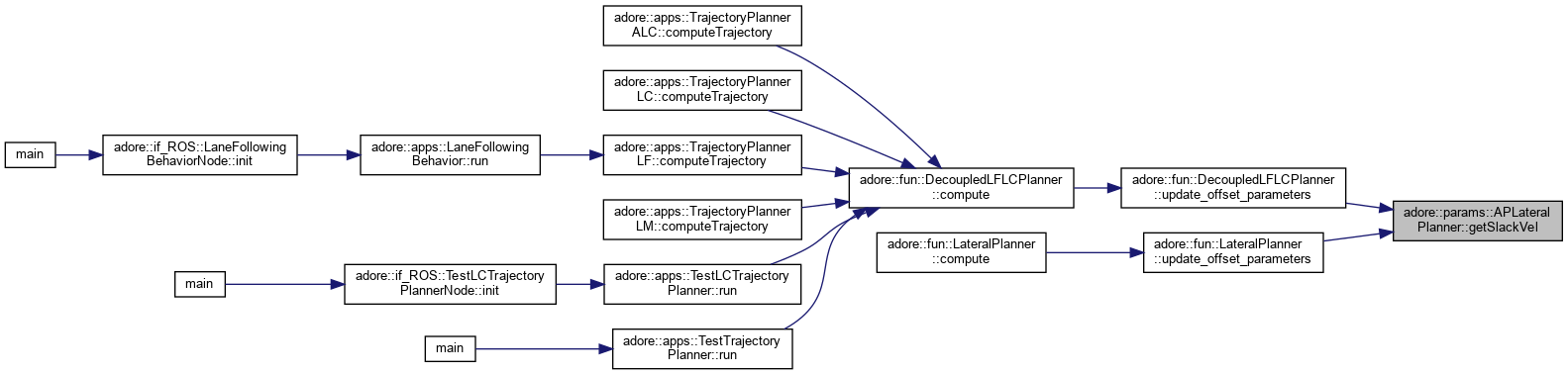
| virtual double | getSlackVel () const =0 |
| getSlackVel returns maximum slack of soft-constraints for velocity More... | |
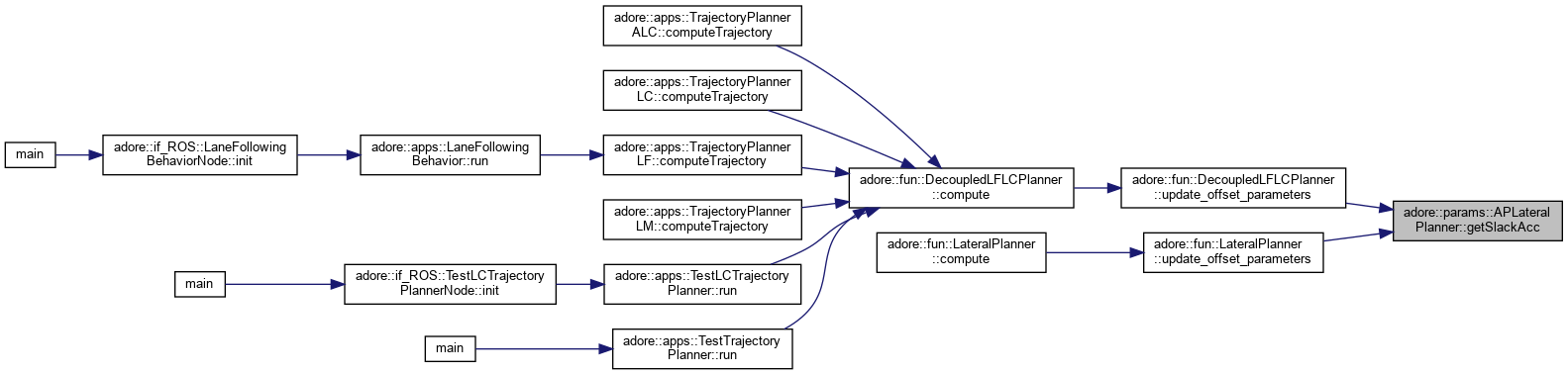
| virtual double | getSlackAcc () const =0 |
| getSlackAcc returns maximum slack of soft-constraints for acceleration More... | |
| virtual double | getAccLB () const =0 |
| getAccLB returns lateral acceleration lower bound More... | |
| virtual double | getAccUB () const =0 |
| getAccUB returns lateral acceleration upper bound More... | |
| virtual double | getJerkLB () const =0 |
| getJerkLB returns lateral jerk lower bound More... | |
| virtual double | getJerkUB () const =0 |
| getJerkLB returns lateral jerk upper bound More... | |
| virtual double | getCurvatureUB () const =0 |
| getCurvatureUB returns maximum curvature of path (relevant at low speeds) More... | |
| virtual double | getCurvatureLB () const =0 |
| getCurvatureLB returns minimum curvature of path (relevant at low speeds) More... | |
| virtual double | getRelativeHeadingUB () const =0 |
| getRelativeHeadingUB returns upper bound on heading deviation from current lane's coordinate system More... | |
| virtual double | getRelativeHeadingLB () const =0 |
| getRelativeHeadingLB returns lower bound on heading deviation from current lane's coordinate system More... | |
| virtual double | getMergeConstraintDelay () const =0 |
| getMergeConstraintDelay returns a time-delay after which lateral position constraints are activated, if they are initially violated More... | |
| virtual double | getHardSafetyDistanceToLaneBoundary () const =0 |
| getHardSafetyDistanceToLaneBoundary returns the minimum distance between lane boundary and vehicle side More... | |
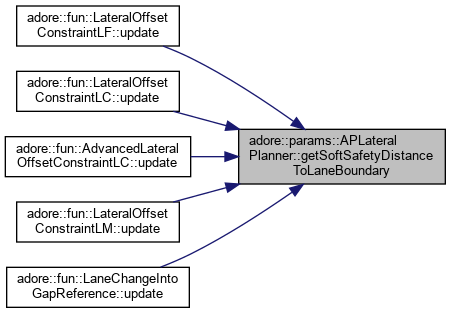
| virtual double | getSoftSafetyDistanceToLaneBoundary () const =0 |
| getSoftSafetyDistanceToLaneBoundary returns the minimum distance between lane boundary and vehicle side, which is enforced, if sufficient space is available More... | |
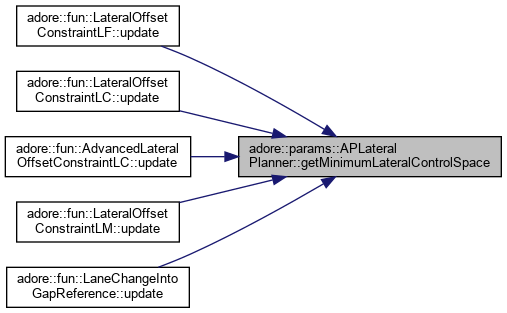
| virtual double | getMinimumLateralControlSpace () const =0 |
| getMinimumLateralControlSpace returns the minimum desired lateral control space: If vehicle has more space for lateral control, softSafetyDistanceToLaneBoundary is enforced More... | |
| virtual double | getMaxCPUTime () const =0 |
| getMaxCPUTime returns the maximum cpu time for one plan computation More... | |
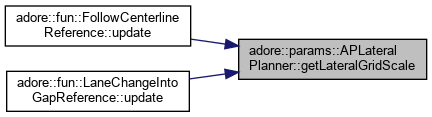
| virtual double | getLateralGridScale () const =0 |
| getLateralGridScale returns the size of a grid step d for lateral variations of a maneuver: maneuver variations will plan for offsets {...,-2d,-d,0,d,2d,..} More... | |
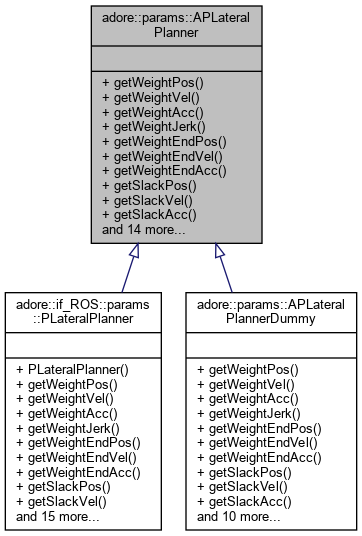
abstract class containing parameters related to configuring the lateral planner
|
pure virtual |
getAccLB returns lateral acceleration lower bound
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.

|
pure virtual |
getAccUB returns lateral acceleration upper bound
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.

|
pure virtual |
getCurvatureLB returns minimum curvature of path (relevant at low speeds)
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.

|
pure virtual |
getCurvatureUB returns maximum curvature of path (relevant at low speeds)
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.

|
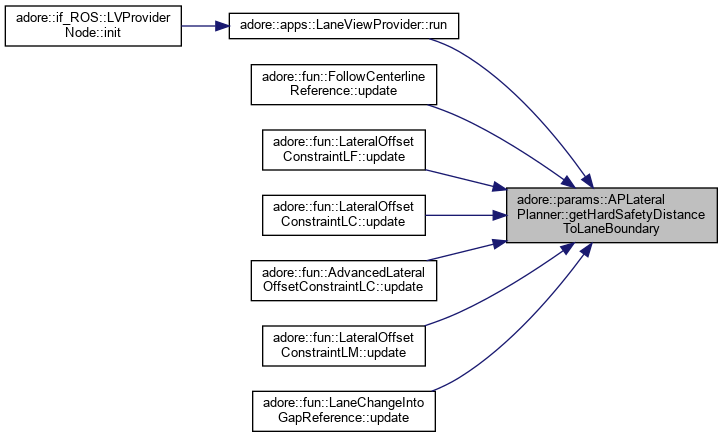
pure virtual |
getHardSafetyDistanceToLaneBoundary returns the minimum distance between lane boundary and vehicle side
Implemented in adore::if_ROS::params::PLateralPlanner.
|
pure virtual |
getJerkLB returns lateral jerk lower bound
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getJerkLB returns lateral jerk upper bound
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getLateralGridScale returns the size of a grid step d for lateral variations of a maneuver: maneuver variations will plan for offsets {...,-2d,-d,0,d,2d,..}
Implemented in adore::if_ROS::params::PLateralPlanner.
|
pure virtual |
getMaxCPUTime returns the maximum cpu time for one plan computation
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getMergeConstraintDelay returns a time-delay after which lateral position constraints are activated, if they are initially violated
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.

|
pure virtual |
getMinimumLateralControlSpace returns the minimum desired lateral control space: If vehicle has more space for lateral control, softSafetyDistanceToLaneBoundary is enforced
Implemented in adore::if_ROS::params::PLateralPlanner.
|
pure virtual |
getRelativeHeadingLB returns lower bound on heading deviation from current lane's coordinate system
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.

|
pure virtual |
getRelativeHeadingUB returns upper bound on heading deviation from current lane's coordinate system
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.

|
pure virtual |
getSlackAcc returns maximum slack of soft-constraints for acceleration
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getSlackPos returns maximum slack of soft-constraints for position
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getSlackVel returns maximum slack of soft-constraints for velocity
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getSoftSafetyDistanceToLaneBoundary returns the minimum distance between lane boundary and vehicle side, which is enforced, if sufficient space is available
Implemented in adore::if_ROS::params::PLateralPlanner.
|
pure virtual |
getWeightAcc returns cost function weight for quadratic acceleration term
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getWeightEndAcc returns cost function weight for quadratic acceleration term at end point
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getWeightEndPos returns cost function weight for quadratic position error term at end point
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getWeightEndVel returns cost function weight for quadratic velocity error term at end point
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getWeightJerk returns cost function weight for quadratic jerk term
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getWeightPos returns cost function weight for quadratic position error term
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.
|
pure virtual |
getWeightVel returns cost function weight for quadratic velocity error term
Implemented in adore::if_ROS::params::PLateralPlanner, and adore::params::APLateralPlannerDummy.