|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
parameter interface for parameters related to prediction More...
#include <ap_prediction.h>
Public Member Functions | |
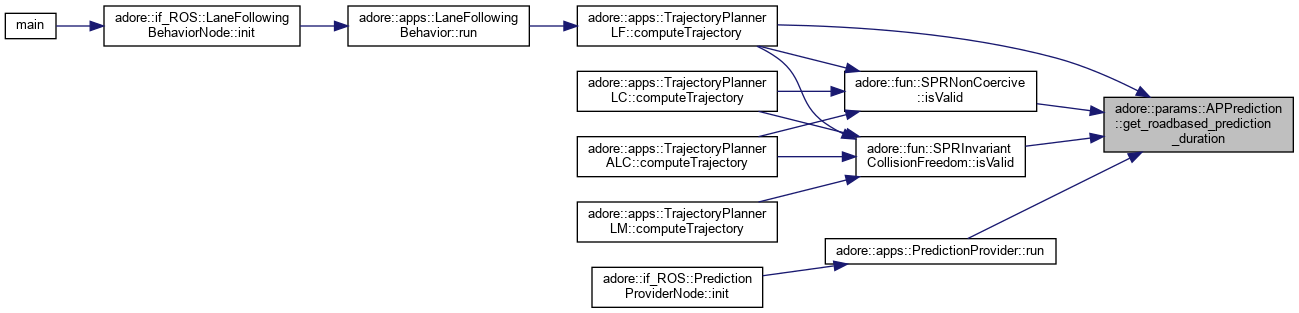
| virtual double | get_roadbased_prediction_duration () const =0 |
| prediction duration for objects that can be matched to road More... | |
| virtual double | get_roadbased_expected_acc_ub () const =0 |
| maximum acceleration for normal behavior for objects that can be matched to road More... | |
| virtual double | get_roadbased_expected_acc_ub_delay () const =0 |
| delay after which expected_acc_ub is applied More... | |
| virtual double | get_roadbased_expected_acc_lb () const =0 |
| minimum acceleration for normal behavior for objects that can be matched to road More... | |
| virtual double | get_roadbased_expected_vel_ub () const =0 |
| maximum velocity for normal behavior for objects that can be matched to road More... | |
| virtual double | get_roadbased_worstcase_acc_ub () const =0 |
| maximum acceleration for worst-case behavior for objects that can be matched to road More... | |
| virtual double | get_roadbased_worstcase_acc_ub_delay () const =0 |
| delay after which worstcase_acc_ub is applied More... | |
| virtual double | get_roadbased_worstcase_acc_lb () const =0 |
| minimum acceleration for worst-case for objects that can be matched to road More... | |
| virtual double | get_roadbased_worstcase_vel_ub () const =0 |
| maximum velocity for worst-case for objects that can be matched to road More... | |
| virtual double | get_roadbased_heading_deviation_ub () const =0 |
| maximum difference between object and road heading for object to be matchable to road More... | |
| virtual double | get_roadbased_lat_precision () const =0 |
| precision of object shape approximation in lateral direction for objects that can be matched to road More... | |
| virtual double | get_roadbased_lat_error () const =0 |
| assumed maximum lateral detection error for objects that can be matched to road (buffer zone) More... | |
| virtual double | get_roadbased_lon_error () const =0 |
| assumed maximum longitudinal detectionfor objects that can be matched to road (buffer zone) More... | |
| virtual double | get_roadbased_time_headway () const =0 |
| time buffer ahead of an object (objrect predicted to arrive given seconds earlier at a location) More... | |
| virtual double | get_roadbased_time_leeway () const =0 |
| time buffer behind object (object predicted to leave a location given seconds later) More... | |
| virtual double | get_offroad_prediction_duration () const =0 |
| prediction duration for objects that can not be matched to road More... | |
| virtual double | get_offroad_expected_acc_ub () const =0 |
| maximum acceleration for normal behavior for objects that can not be matched to road More... | |
| virtual double | get_offroad_expected_acc_lb () const =0 |
| minimum acceleration for normal behavior for objects that can not be matched to road More... | |
| virtual double | get_offroad_expected_vel_ub () const =0 |
| maximum velocity for normal behavior for objects that can not be matched to road More... | |
| virtual double | get_offroad_worstcase_acc_ub () const =0 |
| maximum acceleration for worst-case behavior for objects that can not be matched to road More... | |
| virtual double | get_offroad_worstcase_acc_ub_delay () const =0 |
| delay after which worstcase_acc_ub is applied More... | |
| virtual double | get_offroad_worstcase_acc_lb () const =0 |
| minimum acceleration for worst-case behavior for objects that can not be matched to road More... | |
| virtual double | get_offroad_worstcase_vel_ub () const =0 |
| maximum velocity for worst-case behavior for objects that can not be matched to road More... | |
| virtual double | get_offroad_lat_precision () const =0 |
| precision of object shape approximation in lateral direction for objects that can not be matched to road More... | |
| virtual double | get_offroad_lat_error () const =0 |
| assumed maximum lateral detection error for objects that can not be matched to road More... | |
| virtual double | get_offroad_lon_error () const =0 |
| assumed maximum longitudinal detection error for objects that can not be matched to road More... | |
| virtual double | get_offroad_time_headway () const =0 |
| time buffer ahead of an object (objrect predicted to arrive given seconds earlier at a location) More... | |
| virtual double | get_offroad_time_leeway () const =0 |
| time buffer behind object (object predicted to leave a location given seconds later) More... | |
| virtual double | get_area_of_interest_shrink () const =0 |
| distinction between clutter and static traffic objects: how far into road has object to extend to be recognized as traffic? More... | |
| virtual double | get_area_of_effect_shrink () const =0 |
| filtering out all static objects not inside area of effect More... | |
| virtual bool | get_worstcase_filter_precedence () const =0 |
| filtering of precedence rules for worstcase maneuvers: More... | |
| virtual bool | get_worstcase_filter_tcd () const =0 |
| filtering of tcd for worstcase maneuvers: More... | |
| virtual int | get_setbased_prediction_strategy () const =0 |
| returns prediction strategy: 0 width of object, 1 width of road, 2 width of object-> width of road More... | |
| virtual double | get_prediction_width_ub () const =0 |
| returns maximum width for a prediction More... | |
| virtual double | get_prediction_width_lb () const =0 |
| returns the minimum width for a prediction More... | |
parameter interface for parameters related to prediction
|
pure virtual |
filtering out all static objects not inside area of effect
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
distinction between clutter and static traffic objects: how far into road has object to extend to be recognized as traffic?
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
minimum acceleration for normal behavior for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
maximum acceleration for normal behavior for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
maximum velocity for normal behavior for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
assumed maximum lateral detection error for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
precision of object shape approximation in lateral direction for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
assumed maximum longitudinal detection error for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
prediction duration for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
time buffer ahead of an object (objrect predicted to arrive given seconds earlier at a location)
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
time buffer behind object (object predicted to leave a location given seconds later)
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
minimum acceleration for worst-case behavior for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
maximum acceleration for worst-case behavior for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
delay after which worstcase_acc_ub is applied
Implemented in adore::if_ROS::params::PPrediction.
|
pure virtual |
maximum velocity for worst-case behavior for objects that can not be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
returns the minimum width for a prediction
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
returns maximum width for a prediction
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
minimum acceleration for normal behavior for objects that can be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
maximum acceleration for normal behavior for objects that can be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
delay after which expected_acc_ub is applied
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
maximum velocity for normal behavior for objects that can be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
maximum difference between object and road heading for object to be matchable to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
assumed maximum lateral detection error for objects that can be matched to road (buffer zone)
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
precision of object shape approximation in lateral direction for objects that can be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
assumed maximum longitudinal detectionfor objects that can be matched to road (buffer zone)
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
prediction duration for objects that can be matched to road
Implemented in adore::if_ROS::params::PPrediction.
|
pure virtual |
time buffer ahead of an object (objrect predicted to arrive given seconds earlier at a location)
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
time buffer behind object (object predicted to leave a location given seconds later)
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
minimum acceleration for worst-case for objects that can be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
maximum acceleration for worst-case behavior for objects that can be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
delay after which worstcase_acc_ub is applied
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
maximum velocity for worst-case for objects that can be matched to road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
returns prediction strategy: 0 width of object, 1 width of road, 2 width of object-> width of road
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
filtering of precedence rules for worstcase maneuvers:
Implemented in adore::if_ROS::params::PPrediction.

|
pure virtual |
filtering of tcd for worstcase maneuvers:
Implemented in adore::if_ROS::params::PPrediction.
