|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
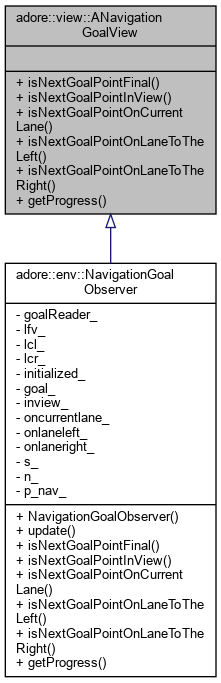
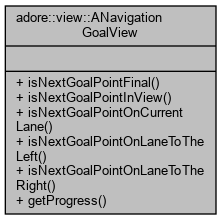
#include <anavigationgoalview.h>
Public Member Functions | |
| virtual const bool | isNextGoalPointFinal () const =0 |
| virtual const bool | isNextGoalPointInView () const =0 |
| virtual const bool | isNextGoalPointOnCurrentLane () const =0 |
| virtual const bool | isNextGoalPointOnLaneToTheLeft () const =0 |
| virtual const bool | isNextGoalPointOnLaneToTheRight () const =0 |
| virtual const double | getProgress () const =0 |
Information about the navigation goal
|
pure virtual |
returns the s-coordinate of the goal point in the current road coordinate system
Implemented in adore::env::NavigationGoalObserver.

|
pure virtual |
isNextGoalPointFinal
Implemented in adore::env::NavigationGoalObserver.

|
pure virtual |
isNextGoalPointInView determines whether the relation of goal-point to lane can be determined
Implemented in adore::env::NavigationGoalObserver.

|
pure virtual |
is true, if the goal point is on the current lane
Implemented in adore::env::NavigationGoalObserver.
|
pure virtual |
isNextGoalPointOnLaneToTheLeft returns true, if the goal point is on a neighboring lane to the left
Implemented in adore::env::NavigationGoalObserver.
|
pure virtual |
isNextGoalPointOnLaneToTheRight returns true, if the goal point is on a neighboring lane to the right
Implemented in adore::env::NavigationGoalObserver.