|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
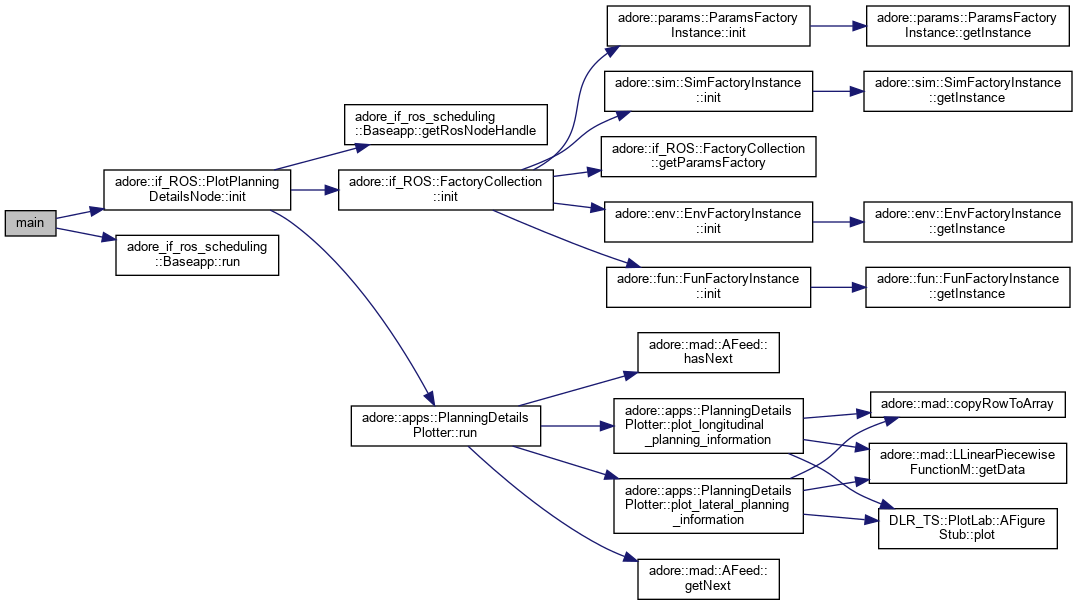
#include <plotlablib/figurestubfactory.h>#include <adore/apps/plot_planning_details.h>#include <adore_if_ros_scheduling/baseapp.h>#include <adore_if_ros/factorycollection.h>#include <ros/ros.h>
Classes | |
| class | adore::if_ROS::PlotPlanningDetailsNode |
Namespaces | |
| adore | |
| adore::if_ROS | |
Functions | |
| int | main (int argc, char **argv) |
Variables | |
| adore::if_ROS::PlotPlanningDetailsNode | ppdn |
| bool | terminated |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| bool terminated |