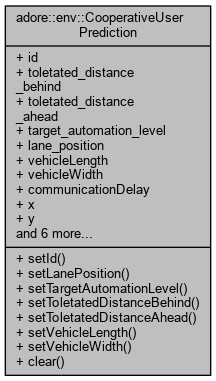
#include <cooperativeusersprediction.h>
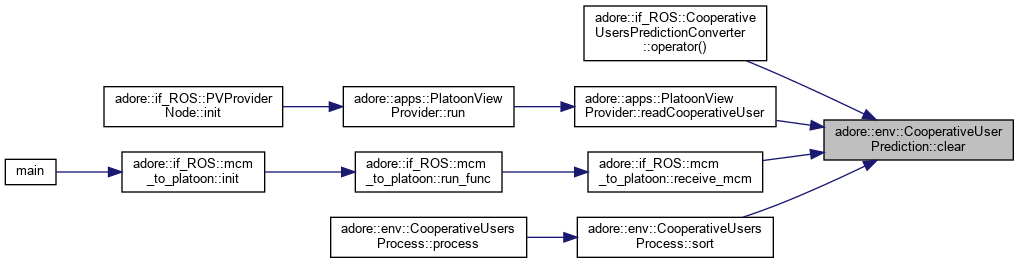
◆ clear()
| void adore::env::CooperativeUserPrediction::clear |
( |
| ) |
|
|
inline |
◆ setId()
| void adore::env::CooperativeUserPrediction::setId |
( |
int |
id | ) |
|
|
inline |
◆ setLanePosition()
| void adore::env::CooperativeUserPrediction::setLanePosition |
( |
int |
lane_position | ) |
|
|
inline |
◆ setTargetAutomationLevel()
| void adore::env::CooperativeUserPrediction::setTargetAutomationLevel |
( |
unsigned int |
target_automation_level | ) |
|
|
inline |
◆ setToletatedDistanceAhead()
| void adore::env::CooperativeUserPrediction::setToletatedDistanceAhead |
( |
double |
toletated_distance_ahead | ) |
|
|
inline |
◆ setToletatedDistanceBehind()
| void adore::env::CooperativeUserPrediction::setToletatedDistanceBehind |
( |
double |
toletated_distance_behind | ) |
|
|
inline |
◆ setVehicleLength()
| void adore::env::CooperativeUserPrediction::setVehicleLength |
( |
double |
vehicleLength | ) |
|
|
inline |
◆ setVehicleWidth()
| void adore::env::CooperativeUserPrediction::setVehicleWidth |
( |
double |
vehicleWidth | ) |
|
|
inline |
| std::vector<double> adore::env::CooperativeUserPrediction::a |
◆ communicationDelay
| double adore::env::CooperativeUserPrediction::communicationDelay |
| struct { ... } adore::env::CooperativeUserPrediction::currentTrajectory |
◆ id
| int adore::env::CooperativeUserPrediction::id |
◆ lane_position
| int adore::env::CooperativeUserPrediction::lane_position |
◆ psi
| std::vector<double> adore::env::CooperativeUserPrediction::psi |
◆ t0
| std::vector<double> adore::env::CooperativeUserPrediction::t0 |
◆ t1
| std::vector<double> adore::env::CooperativeUserPrediction::t1 |
◆ target_automation_level
| unsigned int adore::env::CooperativeUserPrediction::target_automation_level |
◆ toletated_distance_ahead
| double adore::env::CooperativeUserPrediction::toletated_distance_ahead |
◆ toletated_distance_behind
| double adore::env::CooperativeUserPrediction::toletated_distance_behind |
| std::vector<double> adore::env::CooperativeUserPrediction::v |
◆ vehicleLength
| double adore::env::CooperativeUserPrediction::vehicleLength |
◆ vehicleWidth
| double adore::env::CooperativeUserPrediction::vehicleWidth |
| std::vector<double> adore::env::CooperativeUserPrediction::x |
| std::vector<double> adore::env::CooperativeUserPrediction::y |
The documentation for this struct was generated from the following file: