PriorityRoute implicitly references a route between two coordinates. The coordinates should be chosen such that the route is unique.
More...
#include <precedence.h>
|
| typedef boost::geometry::model::point< double, 3, boost::geometry::cs::cartesian > | boost_point |
| |
| typedef boost::geometry::model::box< boost_point > | boost_box |
| |
|
| | PriorityRoute () |
| | empty constructor sets coordinates to 0.0^3 More...
|
| |
| void | set (double f1, double f2, double f3, double t1, double t2, double t3) |
| | set the two coordinates More...
|
| |
| void | set (const std::string &s, bool coordinates_in_UTM=true) |
| | reads PriorityRoute's two coordinates from a string exemplary valid string "0.0,3.5,1.7;1.2,6.6,1.7" More...
|
| |
| boost_box | getBoostBox () |
| | returns a box in boost format, which encompasses start/end points More...
|
| |
| bool | equals (const PriorityRoute &other) const |
| | returns true if all values are equal with other PriorityRoute More...
|
| |
PriorityRoute implicitly references a route between two coordinates. The coordinates should be chosen such that the route is unique.
◆ boost_box
◆ boost_point
◆ PriorityRoute()
| adore::env::PriorityRoute::PriorityRoute |
( |
| ) |
|
|
inline |
empty constructor sets coordinates to 0.0^3
◆ equals()
| bool adore::env::PriorityRoute::equals |
( |
const PriorityRoute & |
other | ) |
const |
|
inline |
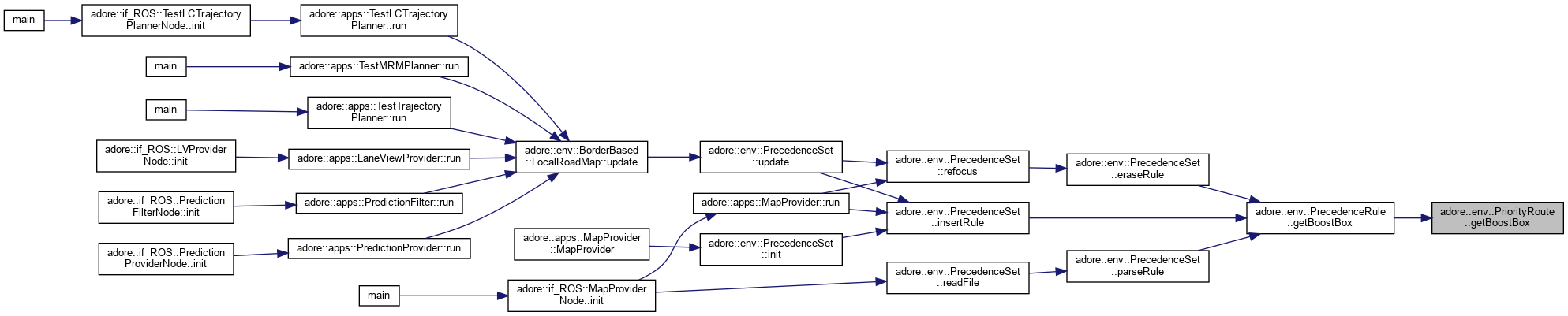
◆ getBoostBox()
| boost_box adore::env::PriorityRoute::getBoostBox |
( |
| ) |
|
|
inline |
returns a box in boost format, which encompasses start/end points
◆ set() [1/2]
| void adore::env::PriorityRoute::set |
( |
const std::string & |
s, |
|
|
bool |
coordinates_in_UTM = true |
|
) |
| |
|
inline |
reads PriorityRoute's two coordinates from a string exemplary valid string "0.0,3.5,1.7;1.2,6.6,1.7"
◆ set() [2/2]
| void adore::env::PriorityRoute::set |
( |
double |
f1, |
|
|
double |
f2, |
|
|
double |
f3, |
|
|
double |
t1, |
|
|
double |
t2, |
|
|
double |
t3 |
|
) |
| |
|
inline |
◆ coordinates_in_UTM_
| bool adore::env::PriorityRoute::coordinates_in_UTM_ |
if true, coordinates are in UTM, otherwise in WGS84
◆ from_
| adoreMatrix<double,3,1> adore::env::PriorityRoute::from_ |
coordinate at which priority route starts
◆ to_
coordinate at which priority route ends
The documentation for this struct was generated from the following file:
- /home/fascar/temp/adore/libadore/libadore/adore/env/include/adore/env/map/precedence.h