|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|

Go to the source code of this file.
Classes | |
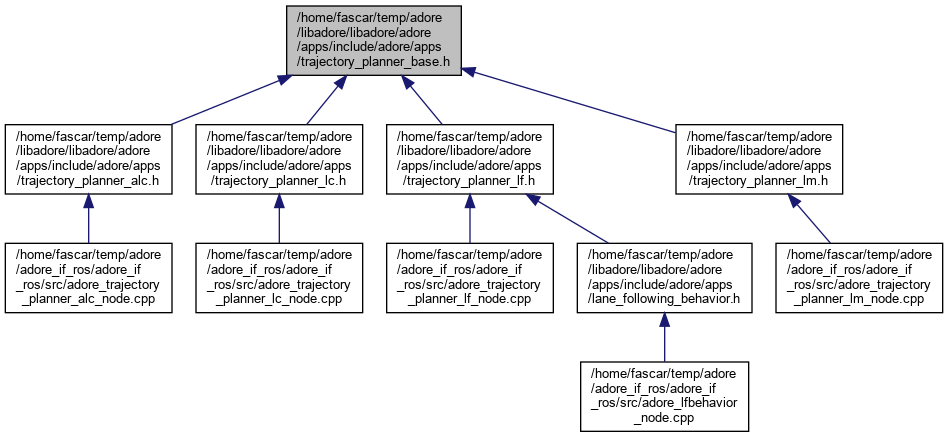
| class | adore::apps::TrajectoryPlannerBase |
| Base class for different trajectory planners: Handles communication w/ decision making module. Reads PlanningRequest and writes PlanningResult. Actual trajectory planning has to occur by overriding virtual computeTrajectory method. More... | |
Namespaces | |
| adore | |
| adore::apps | |
| abstraction of functional modules to define functionality decoupled from the middleware | |