|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
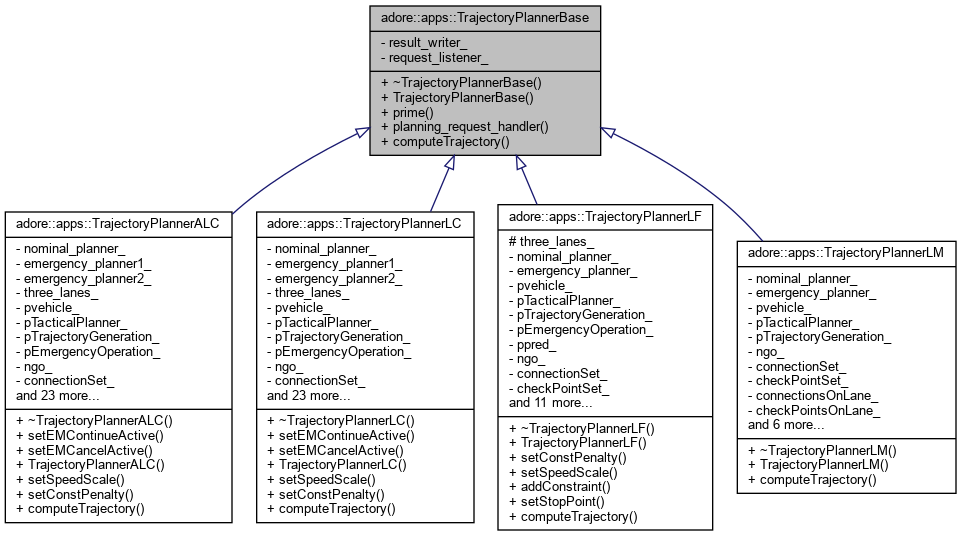
Base class for different trajectory planners: Handles communication w/ decision making module. Reads PlanningRequest and writes PlanningResult. Actual trajectory planning has to occur by overriding virtual computeTrajectory method. More...
#include <trajectory_planner_base.h>
Public Member Functions | |
| virtual | ~TrajectoryPlannerBase () |
| TrajectoryPlannerBase () | |
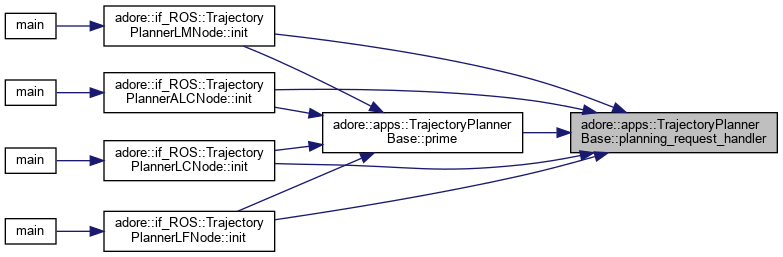
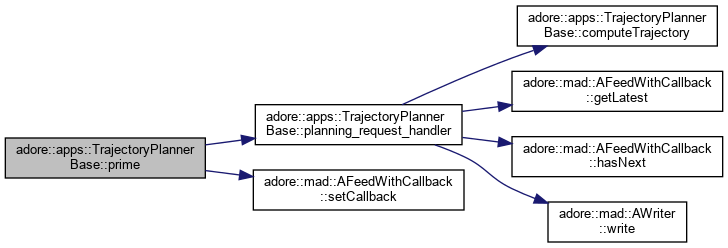
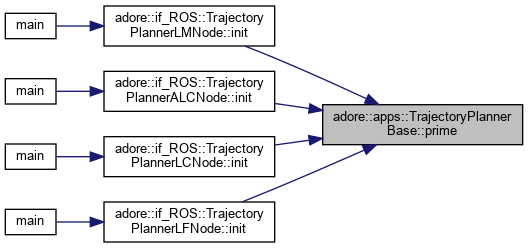
| void | prime () |
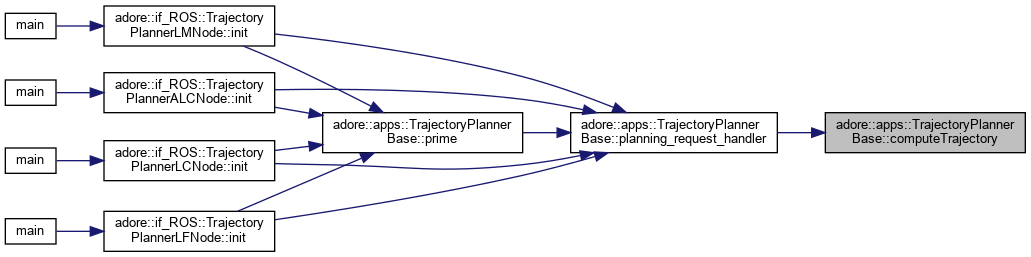
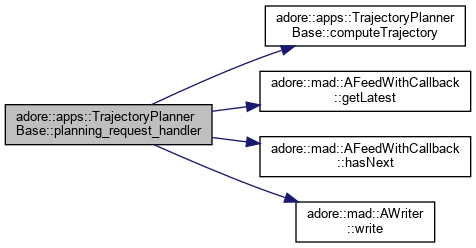
| void | planning_request_handler () |
| virtual void | computeTrajectory (const adore::fun::PlanningRequest &request, adore::fun::PlanningResult &result)=0 |
| override computeTrajectory with actual planning method More... | |
Private Attributes | |
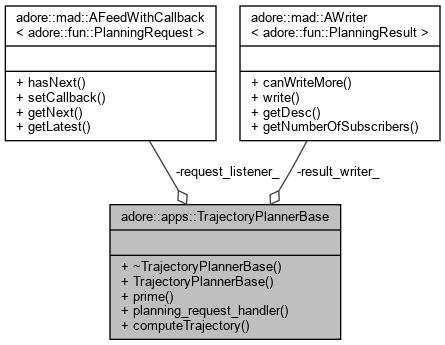
| adore::mad::AWriter< adore::fun::PlanningResult > * | result_writer_ |
| adore::mad::AFeedWithCallback< adore::fun::PlanningRequest > * | request_listener_ |
Base class for different trajectory planners: Handles communication w/ decision making module. Reads PlanningRequest and writes PlanningResult. Actual trajectory planning has to occur by overriding virtual computeTrajectory method.
|
inlinevirtual |
|
inline |

|
pure virtual |
override computeTrajectory with actual planning method
Implemented in adore::apps::TrajectoryPlannerLM, adore::apps::TrajectoryPlannerLF, adore::apps::TrajectoryPlannerLC, and adore::apps::TrajectoryPlannerALC.
|
inline |
|
inline |
|
private |
|
private |