|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
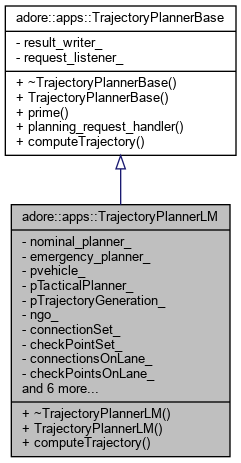
Decoupled trajectory planner, which uses TrajectoryPlannerBase to compute and provide a PlanningResult in the event of a PlanningRequest Computes a lane change trajectory. More...
#include <trajectory_planner_lm.h>
Public Member Functions | |
| virtual | ~TrajectoryPlannerLM () |
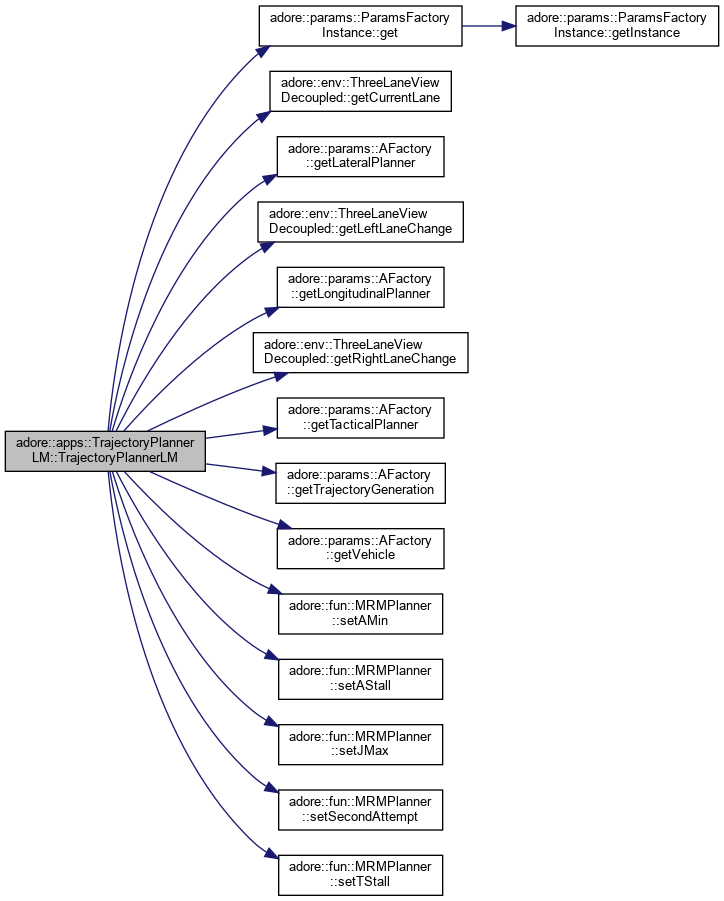
| TrajectoryPlannerLM (bool directionLeft, std::string name, int id) | |
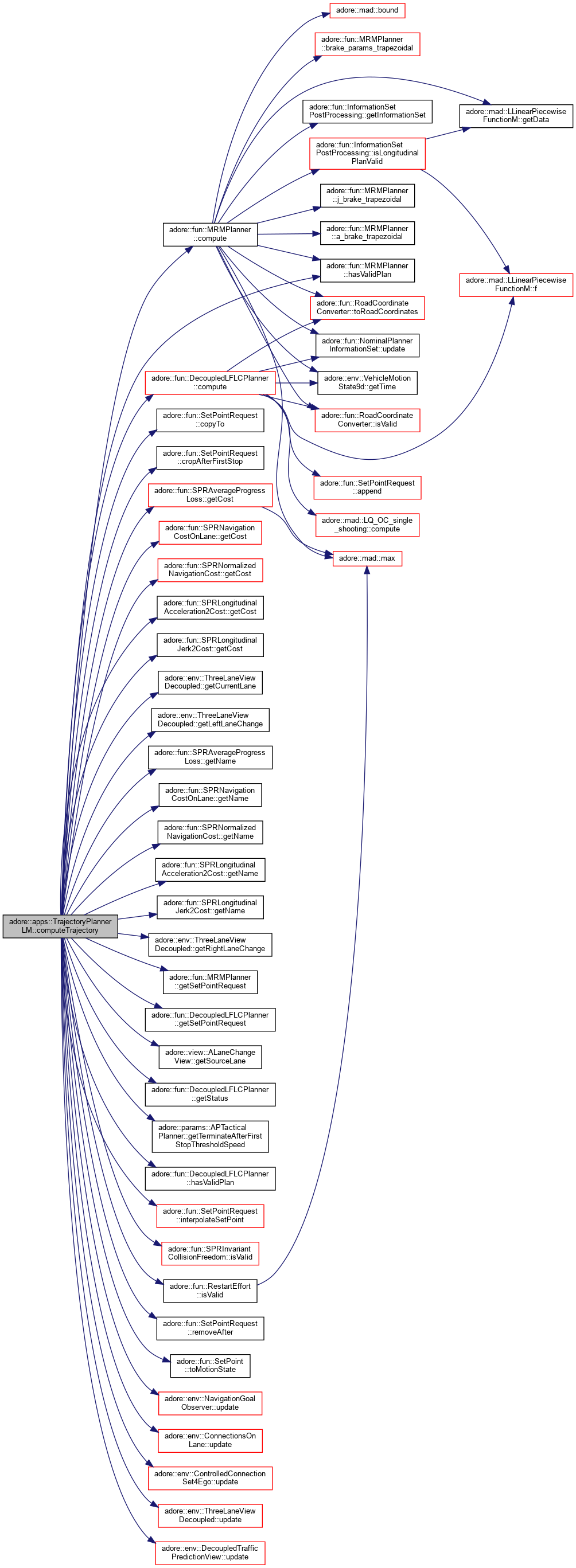
| virtual void | computeTrajectory (const adore::fun::PlanningRequest &planning_request, adore::fun::PlanningResult &planning_result) override |
| update data, views and recompute maneuver More... | |
 Public Member Functions inherited from adore::apps::TrajectoryPlannerBase Public Member Functions inherited from adore::apps::TrajectoryPlannerBase | |
| virtual | ~TrajectoryPlannerBase () |
| TrajectoryPlannerBase () | |
| void | prime () |
| void | planning_request_handler () |
Private Types | |
| typedef adore::fun::BasicMergePlanner< 20, 5 > | TNominalPlanner |
| typedef adore::fun::MergeMRMPlanner< 20, 5 > | TEmergencyPlanner |
Decoupled trajectory planner, which uses TrajectoryPlannerBase to compute and provide a PlanningResult in the event of a PlanningRequest Computes a lane change trajectory.
|
private |
|
private |
|
inlinevirtual |
|
inline |
|
inlineoverridevirtual |
update data, views and recompute maneuver
Implements adore::apps::TrajectoryPlannerBase.
|
private |
state of checkPoints in area
|
private |
map controlled connections to lane
|
private |
combined maneuver post-processing constraints collision detection with traffic predictions
|
private |
state of controlled connections in area
|
private |
|
private |
true if lane change to the left
|
private |
|
private |
integral id to be written to PlanningResult
|
private |
|
private |
|
private |
human readable planner name written to PlanningResult
|
private |
collision detection based representation of traffic
|
private |
|
private |
|
private |
|
private |
map controlled connections to lane lane-based representation of environment