|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <threelaneviewdecoupled.h>
Classes | |
| class | LaneChangeViewProxy |
| class | LaneProxy |
Public Member Functions | |
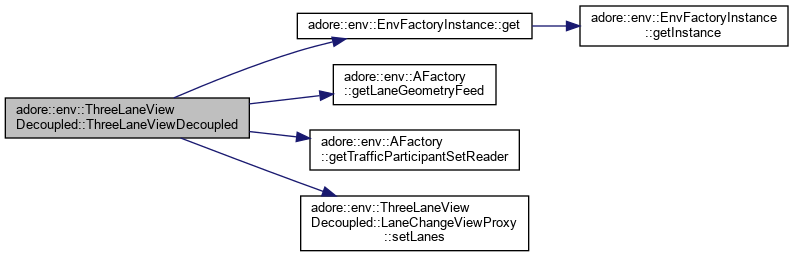
| ThreeLaneViewDecoupled (bool monitor_traffic=true) | |
| virtual | ~ThreeLaneViewDecoupled () |
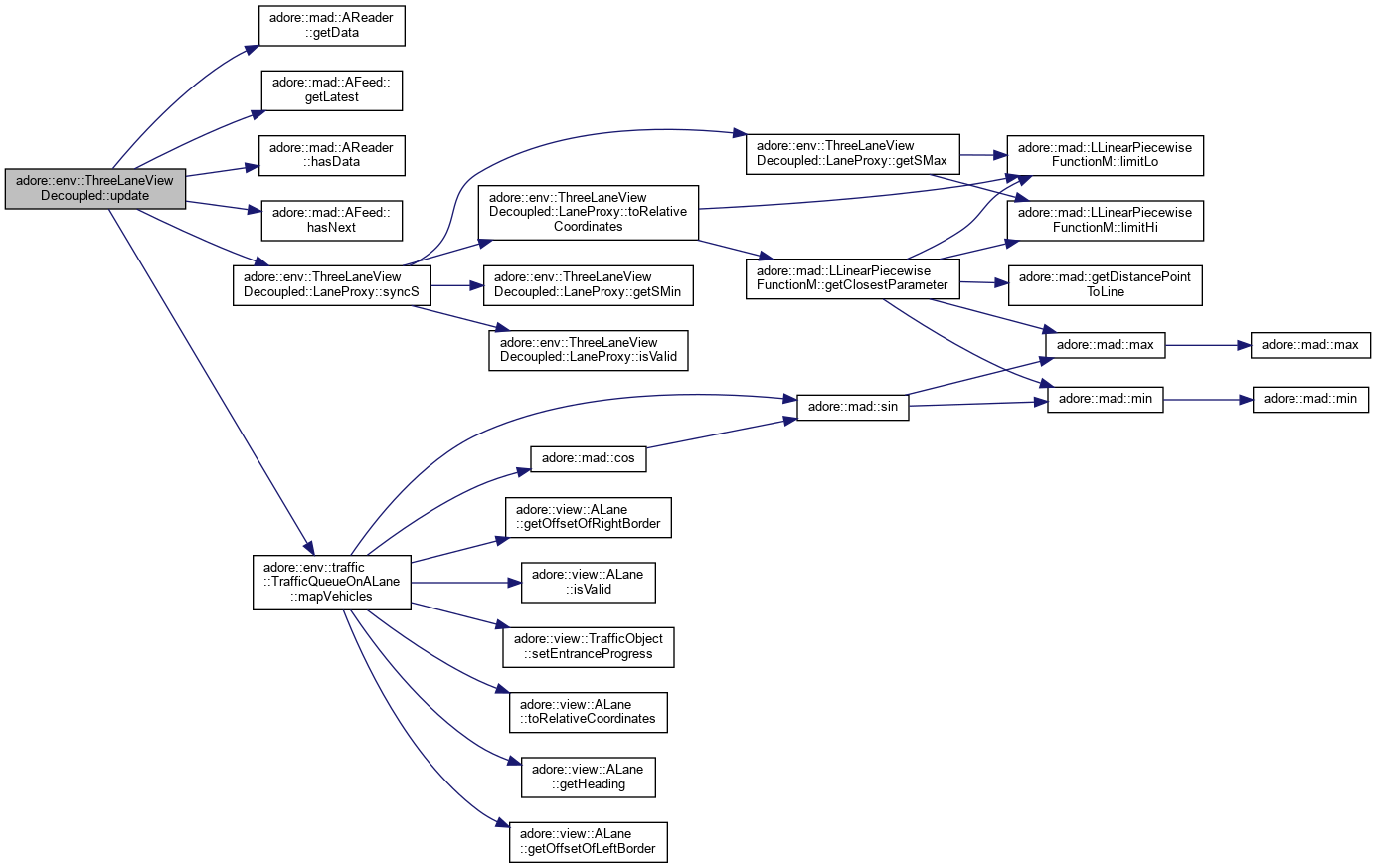
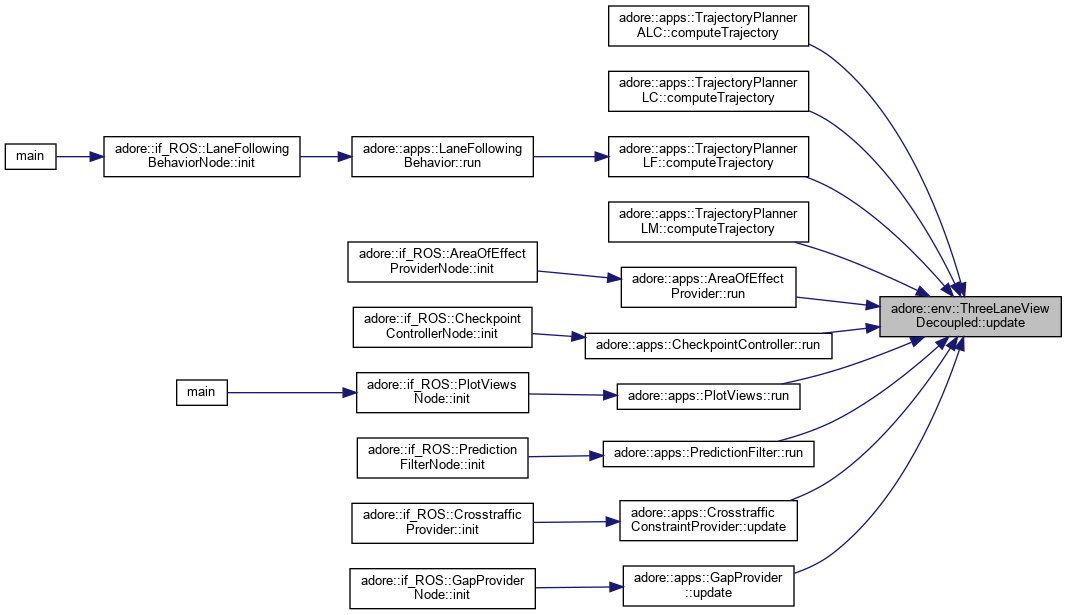
| void | update () |
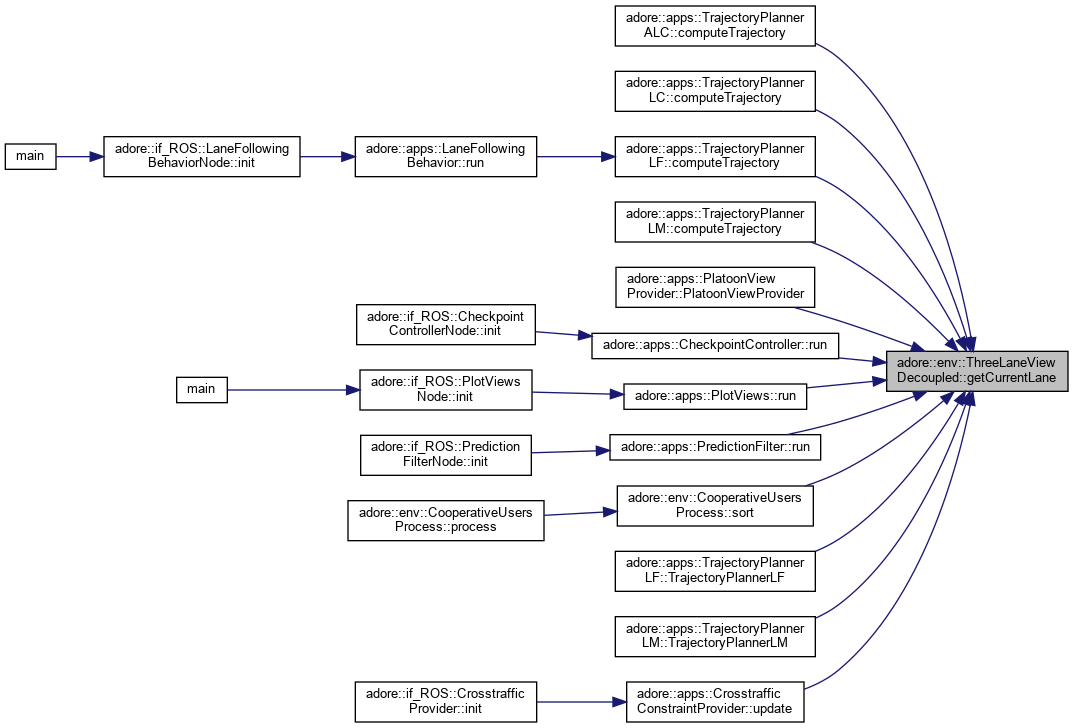
| virtual adore::view::ALane * | getCurrentLane () |
| virtual adore::view::ALaneChangeView * | getLeftLaneChange () |
| virtual adore::view::ALaneChangeView * | getRightLaneChange () |
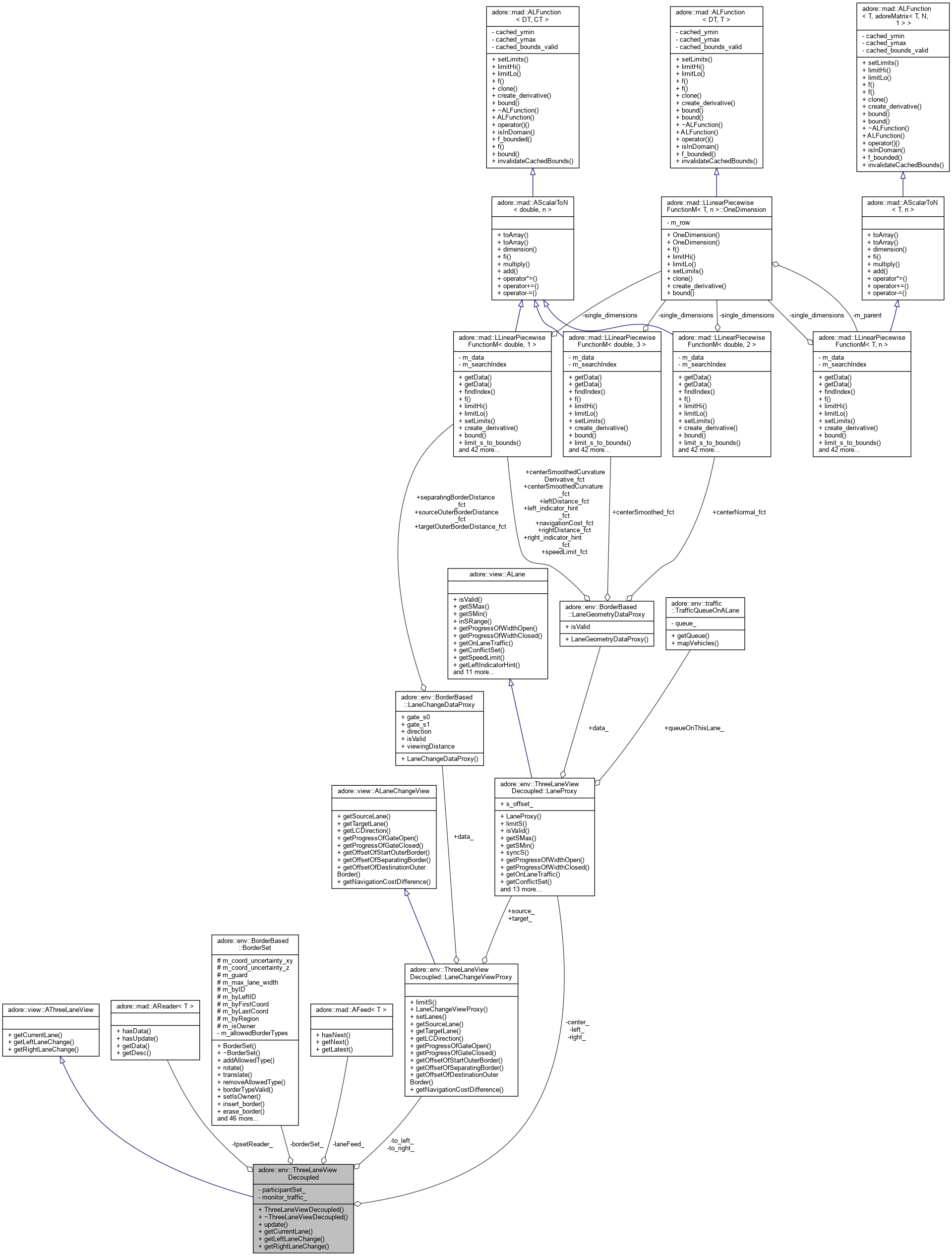
ThreeLaneViewDecoupled - Realization of AThreeLaneView interface, which makes use of decoupled lane geometry computation. The lane geometry for lane following and lane change is asynchronously computed in a different instance, (possibly at lower rate). Traffic data is received and matched to the geometries by this class.
|
inline |
|
inlinevirtual |
|
inlinevirtual |
getCurrentLane - return ALane pointer the vehicle's current lane
Implements adore::view::AThreeLaneView.
|
inlinevirtual |
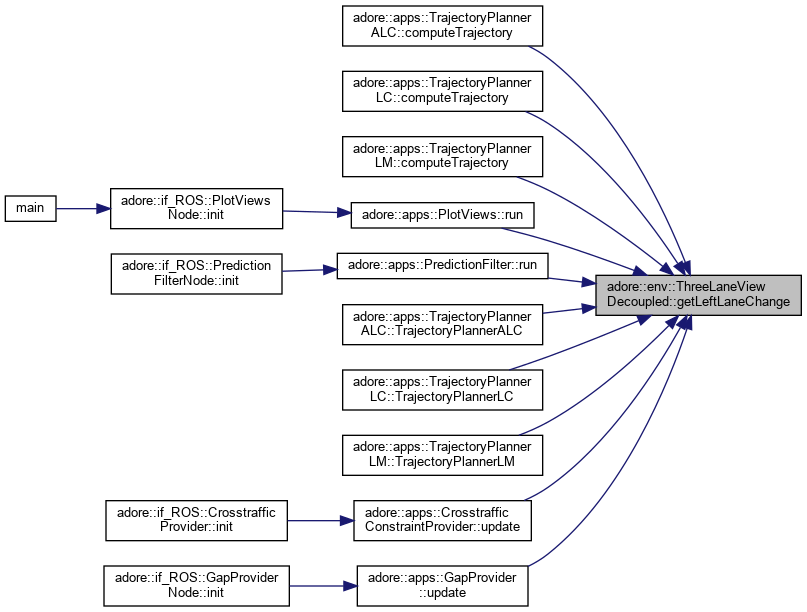
getLeftLaneChange - returns ALaneChangeView pointer to the lane left of the vehicle's current lane.
Implements adore::view::AThreeLaneView.
|
inlinevirtual |
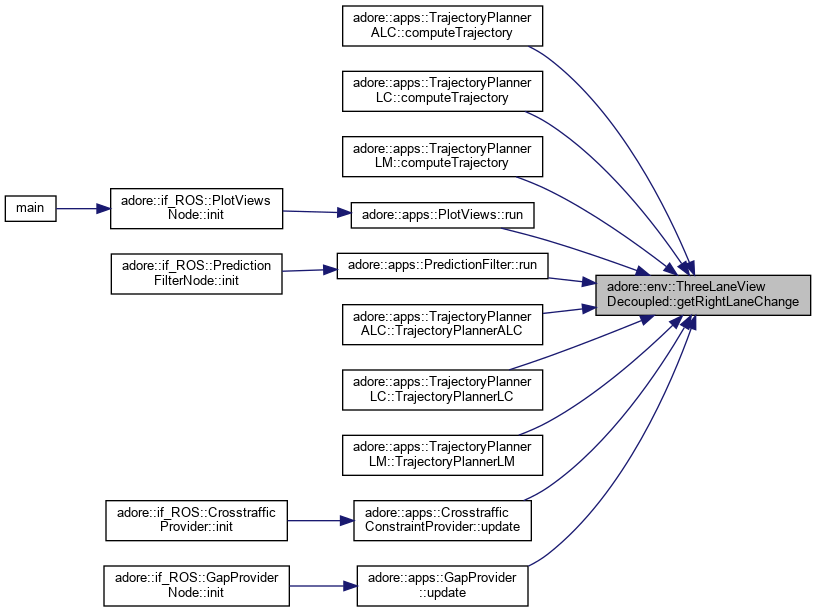
getRightLaneChange - returns ALaneChangeView pointer to the lane right of the vehicle's current lane.
Implements adore::view::AThreeLaneView.
|
inline |
|
private |
set of borders
|
private |
proxy representing ALane interface for center lane
|
private |
data source for lane geometry
|
private |
proxy representing ALane interface for left lane
|
private |
indicates whether traffic is processed
|
private |
set of participants: local buffer
|
private |
proxy representing ALane interface for right lane
|
private |
proxy representing ALaneChangeView interface for left lane
|
private |
proxy representing ALaneChangeView interface for right lane
|
private |
data source for traffic participants