|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <alanechangeview.h>
Public Types | |
| enum | direction { LEFT , RIGHT } |
Public Member Functions | |
| virtual ALane * | getSourceLane ()=0 |
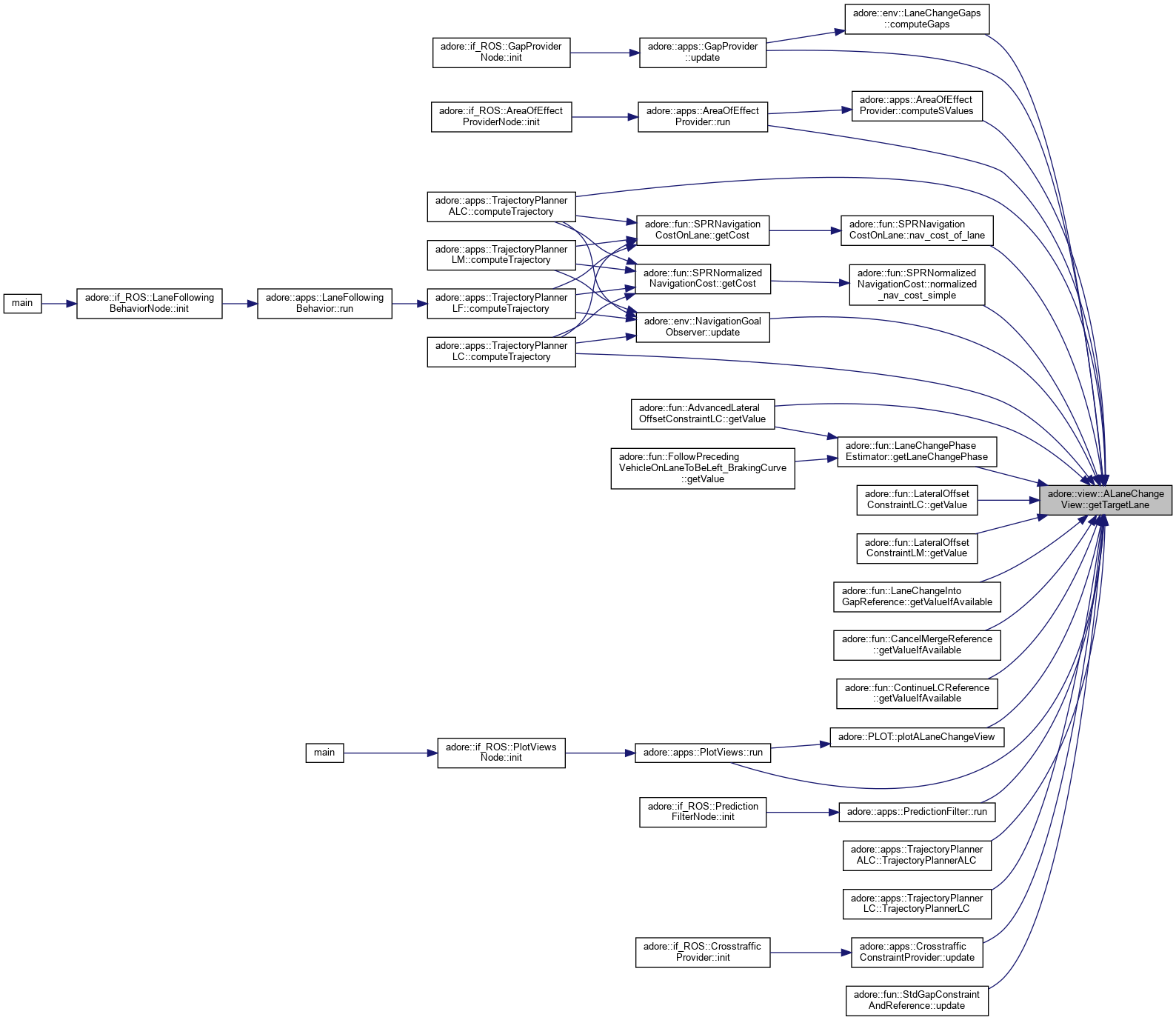
| virtual ALane * | getTargetLane ()=0 |
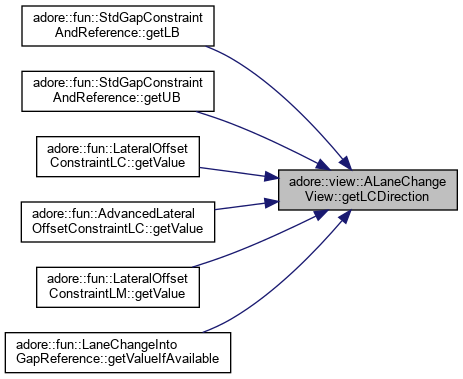
| virtual direction | getLCDirection () const =0 |
| virtual double | getProgressOfGateOpen () const =0 |
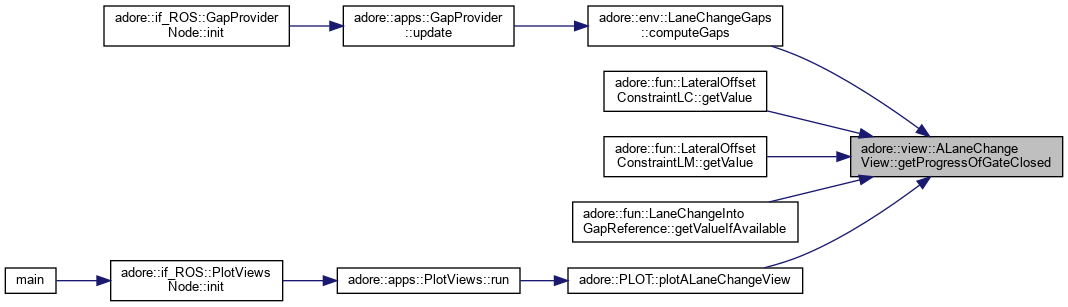
| virtual double | getProgressOfGateClosed () const =0 |
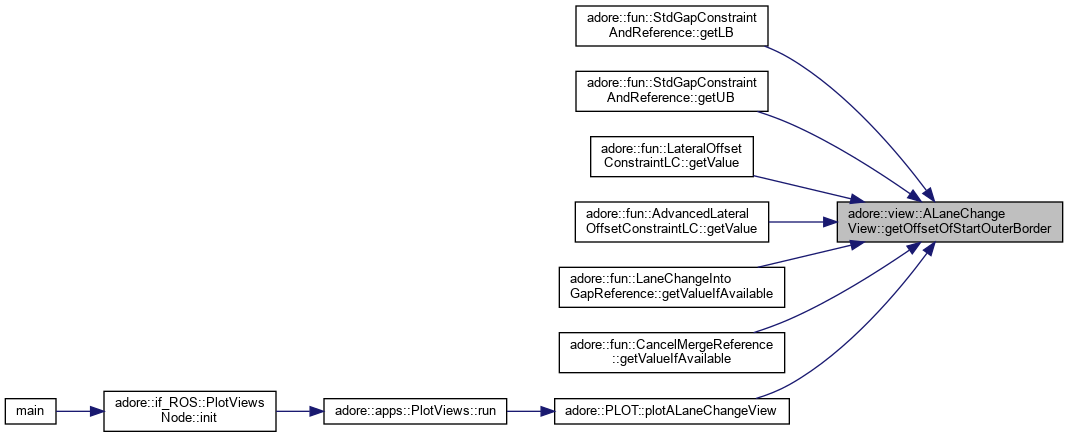
| virtual double | getOffsetOfStartOuterBorder (double s)=0 |
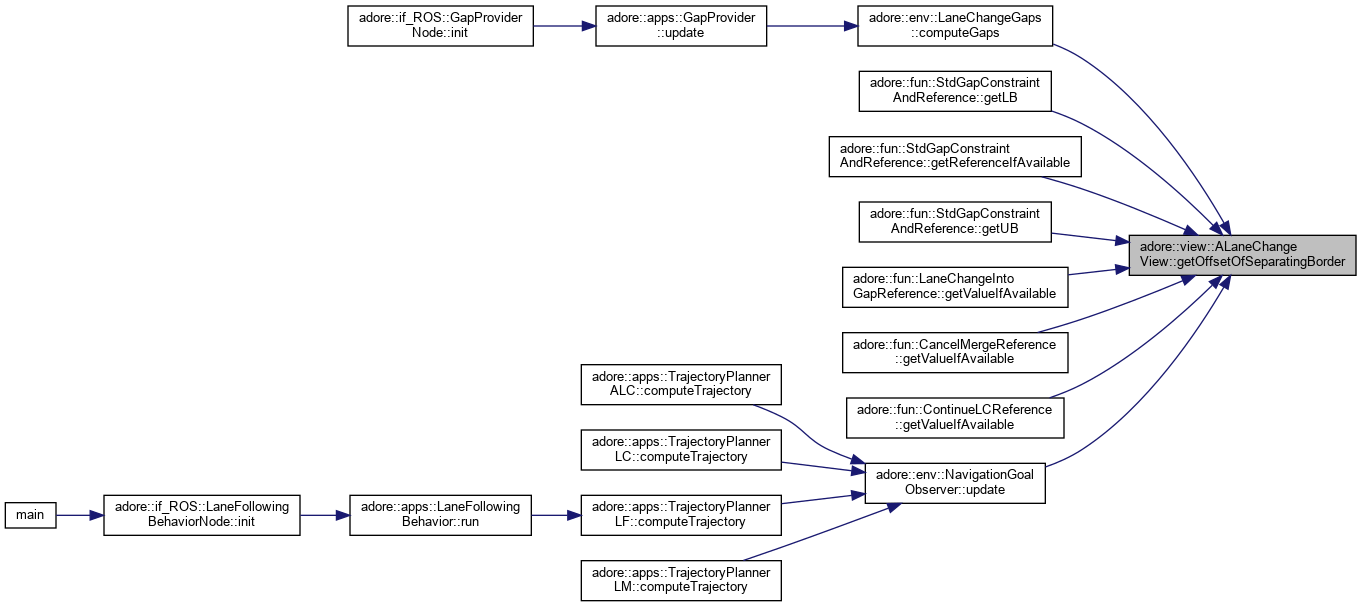
| virtual double | getOffsetOfSeparatingBorder (double s)=0 |
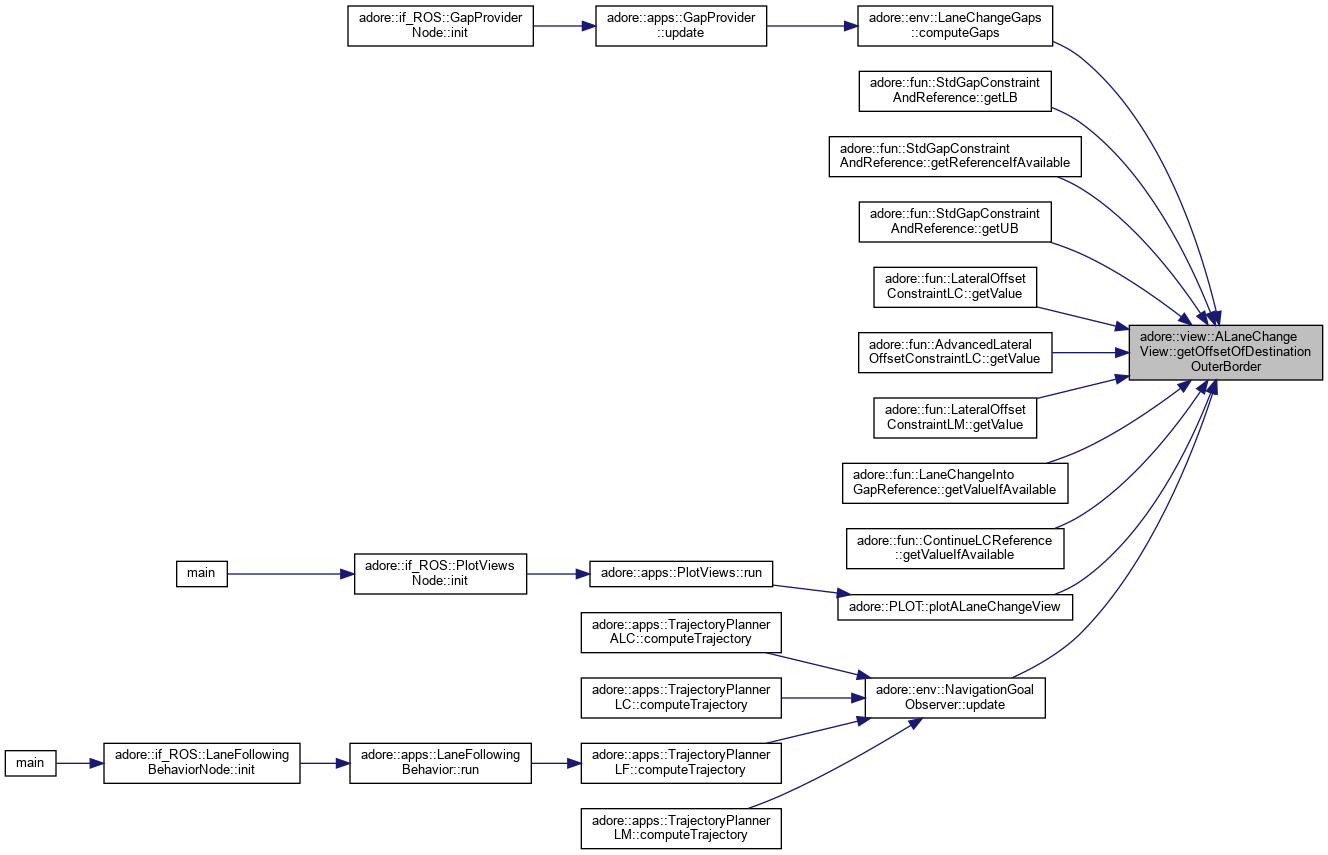
| virtual double | getOffsetOfDestinationOuterBorder (double s)=0 |
| virtual double | getNavigationCostDifference ()=0 |
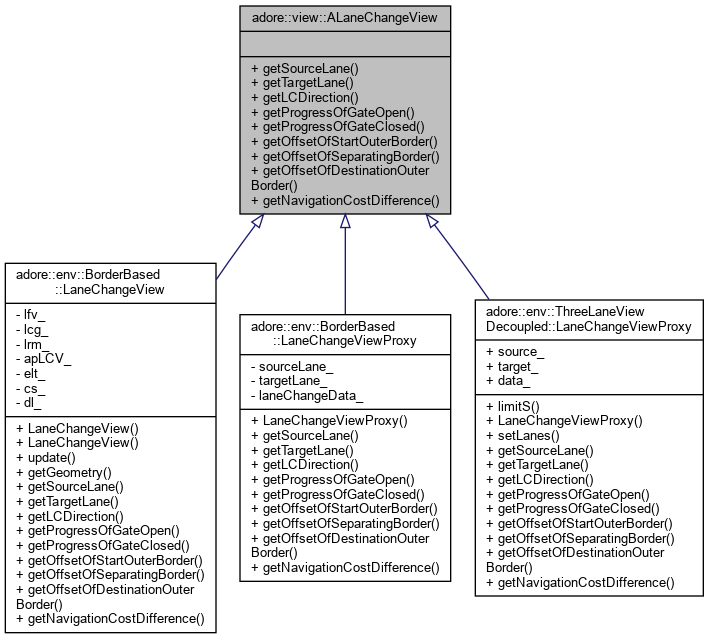
ALaneChangeView - A model / data abstraction required for changing to a target lane. ALaneChangeView couples two ALanes, between which a lane change is possible at a certain longitudinal interval (gate).
|
pure virtual |
getLCDirection - return the direction of a lane change leading to target lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.
|
pure virtual |
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.
|
pure virtual |
getOffsetOfDestinationOuterBorder - return lateral offset n of the outer border of target lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.
|
pure virtual |
getOffsetOfSeparatingBorder - return lateral offset n of the separating border between start and target lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.
|
pure virtual |
getOffsetOfStartOuterBorder - return lateral offset n of the outer border of the AV's current lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.
|
pure virtual |
getProgressOfGateClosed - return progress s of the closure of the next gate (distance to beginngin of solid line or otherwise impassable lane border after gate)
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.
|
pure virtual |
getProgressOfGateOpen - return progress s of the next opening of a gate (distance to end of solid line or otherwise impassable lane border)
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.

|
pure virtual |
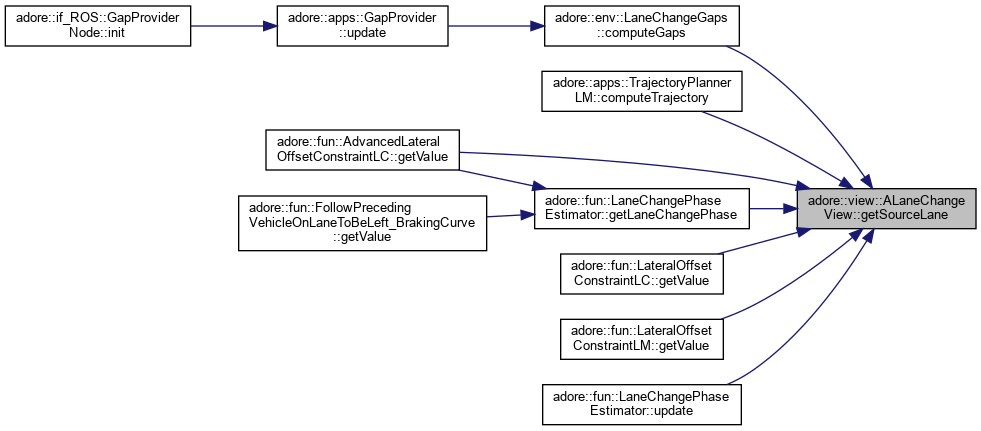
getSourceLane - return ALane pointer for the source lane of the lane change
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.
|
pure virtual |
getSourceLane - return ALane pointer for the target lane of the lane change
Implemented in adore::env::ThreeLaneViewDecoupled::LaneChangeViewProxy, adore::env::BorderBased::LaneChangeViewProxy, and adore::env::BorderBased::LaneChangeView.