|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <alane.h>
Public Member Functions | |
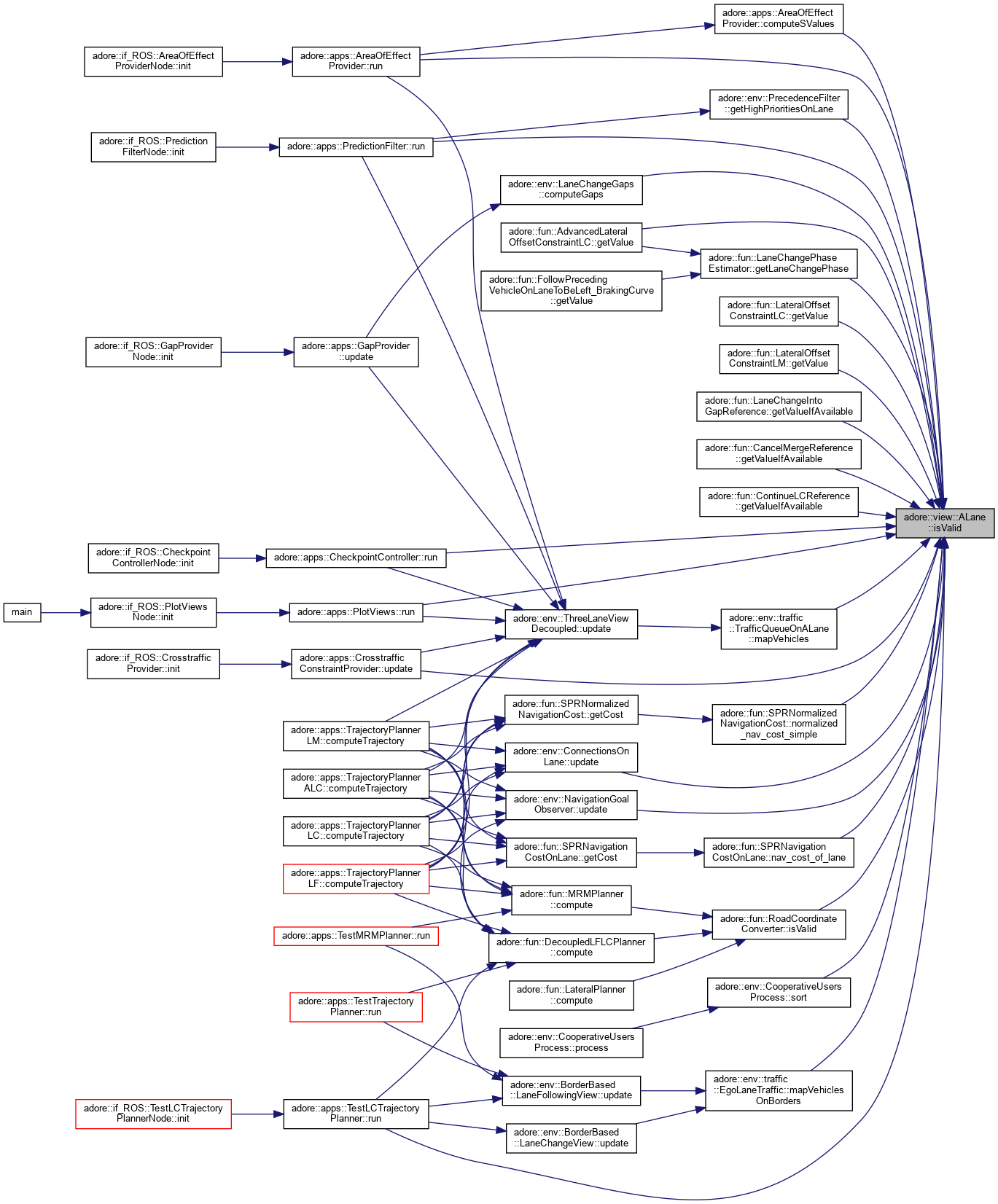
| virtual bool | isValid () const =0 |
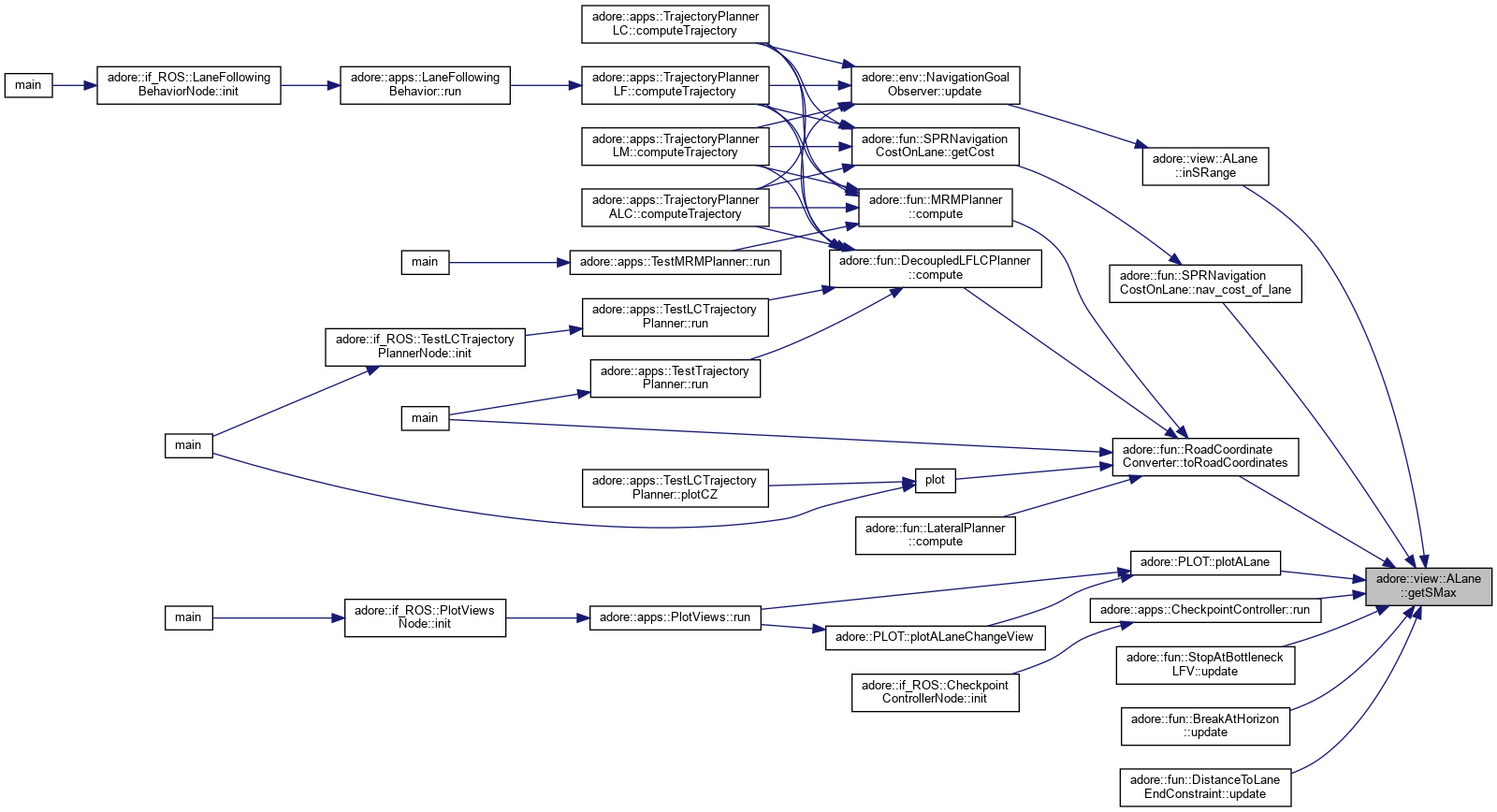
| virtual double | getSMax () const =0 |
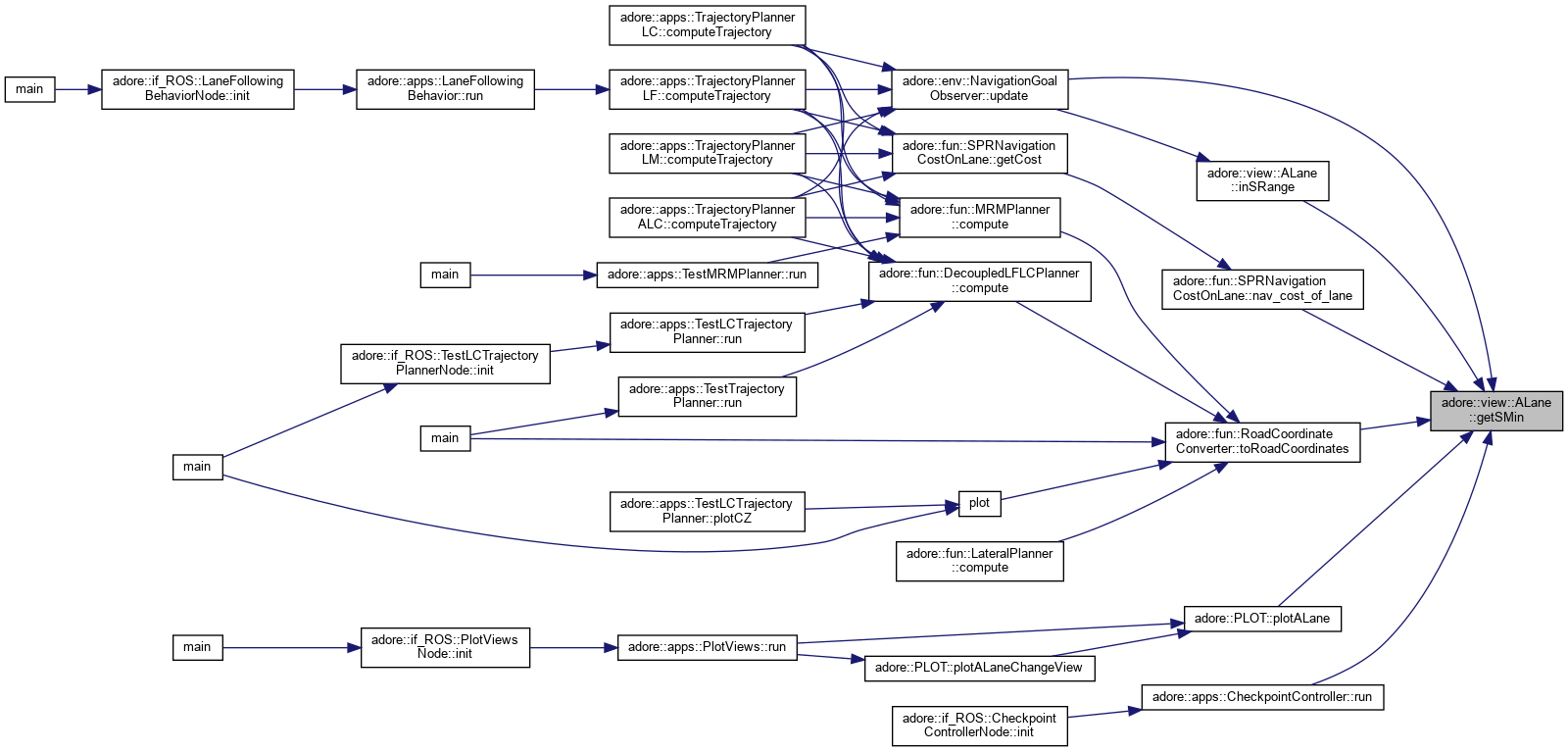
| virtual double | getSMin () const =0 |
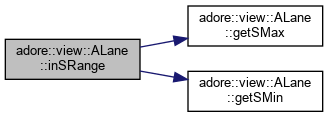
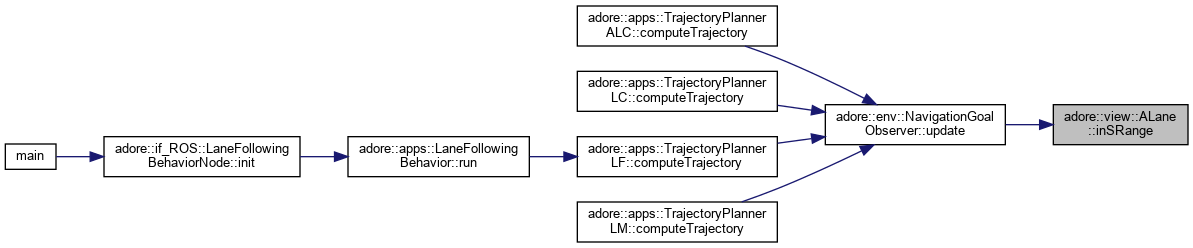
| bool | inSRange (double s) const |
| virtual double | getProgressOfWidthOpen () const =0 |
| virtual double | getProgressOfWidthClosed () const =0 |
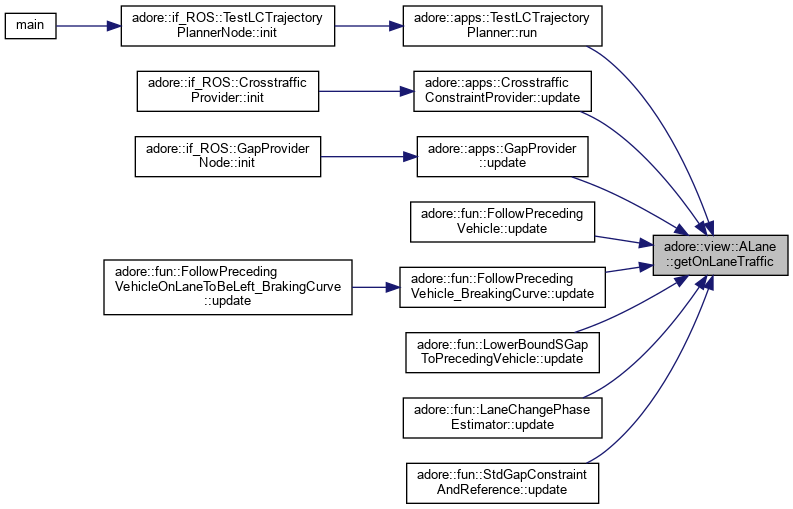
| virtual const TrafficQueue & | getOnLaneTraffic () const =0 |
| virtual const ConflictSet & | getConflictSet () const =0 |
| virtual double | getSpeedLimit (double s)=0 |
| virtual double | getLeftIndicatorHint (double s)=0 |
| virtual double | getRightIndicatorHint (double s)=0 |
| virtual bool | hasSpeedRecommendation (double s) const =0 |
| virtual double | getSpeedRecommendation (double s) const =0 |
| virtual double | getNavigationCost (double s)=0 |
| virtual void | boundNavigationCost (double s0, double s1, double &cmin, double &cmax)=0 |
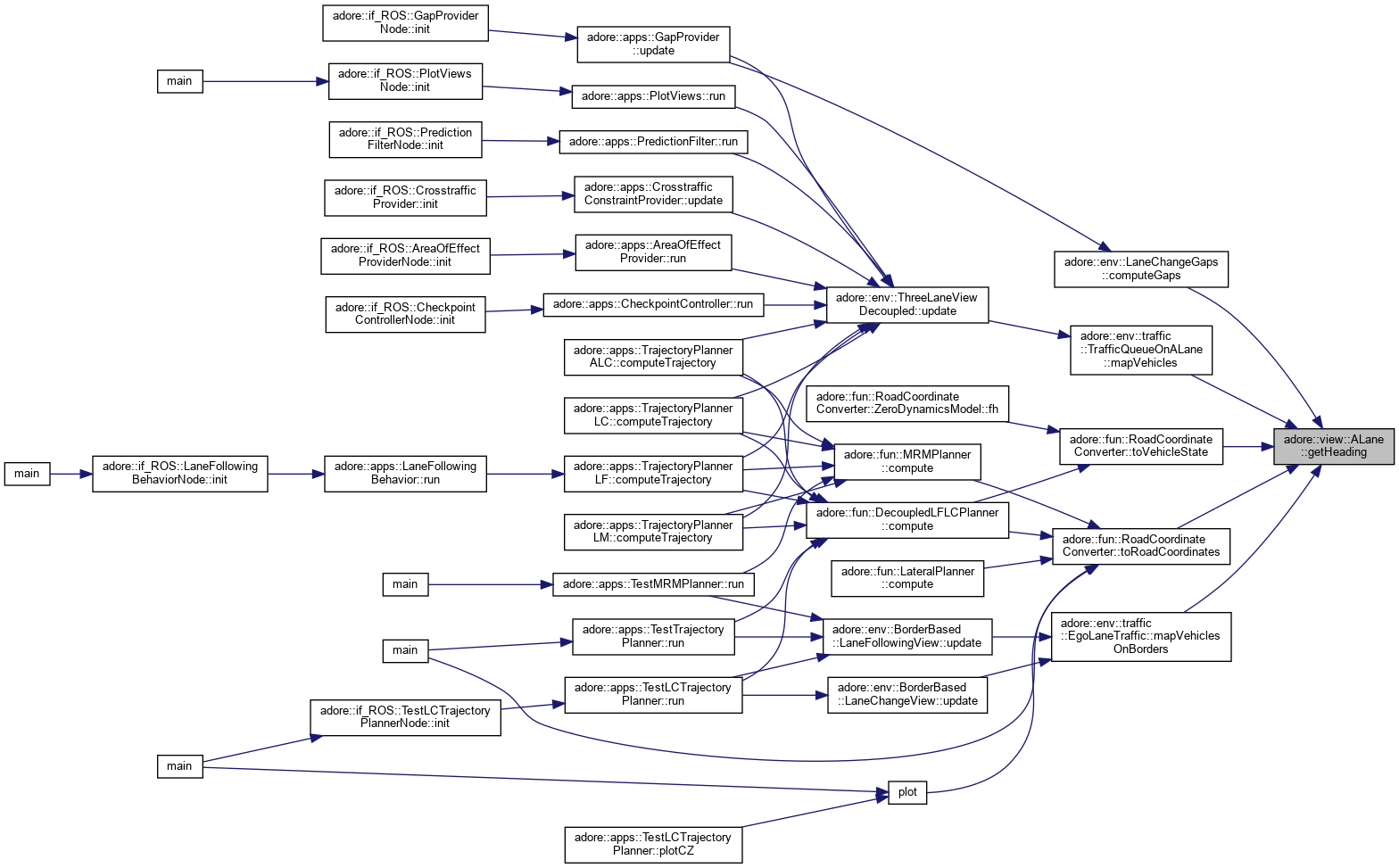
| virtual double | getHeading (double s)=0 |
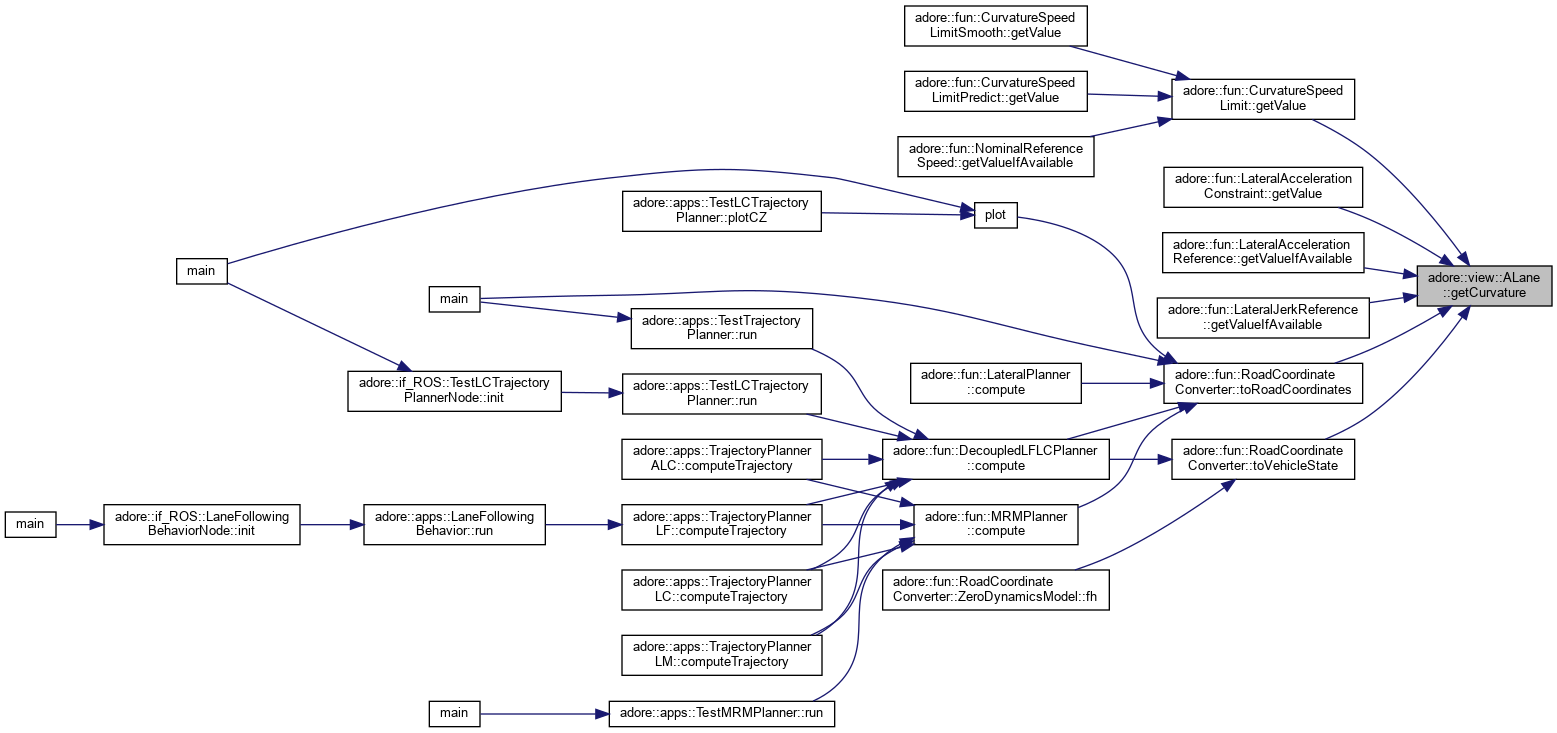
| virtual double | getCurvature (double s, int derivative)=0 |
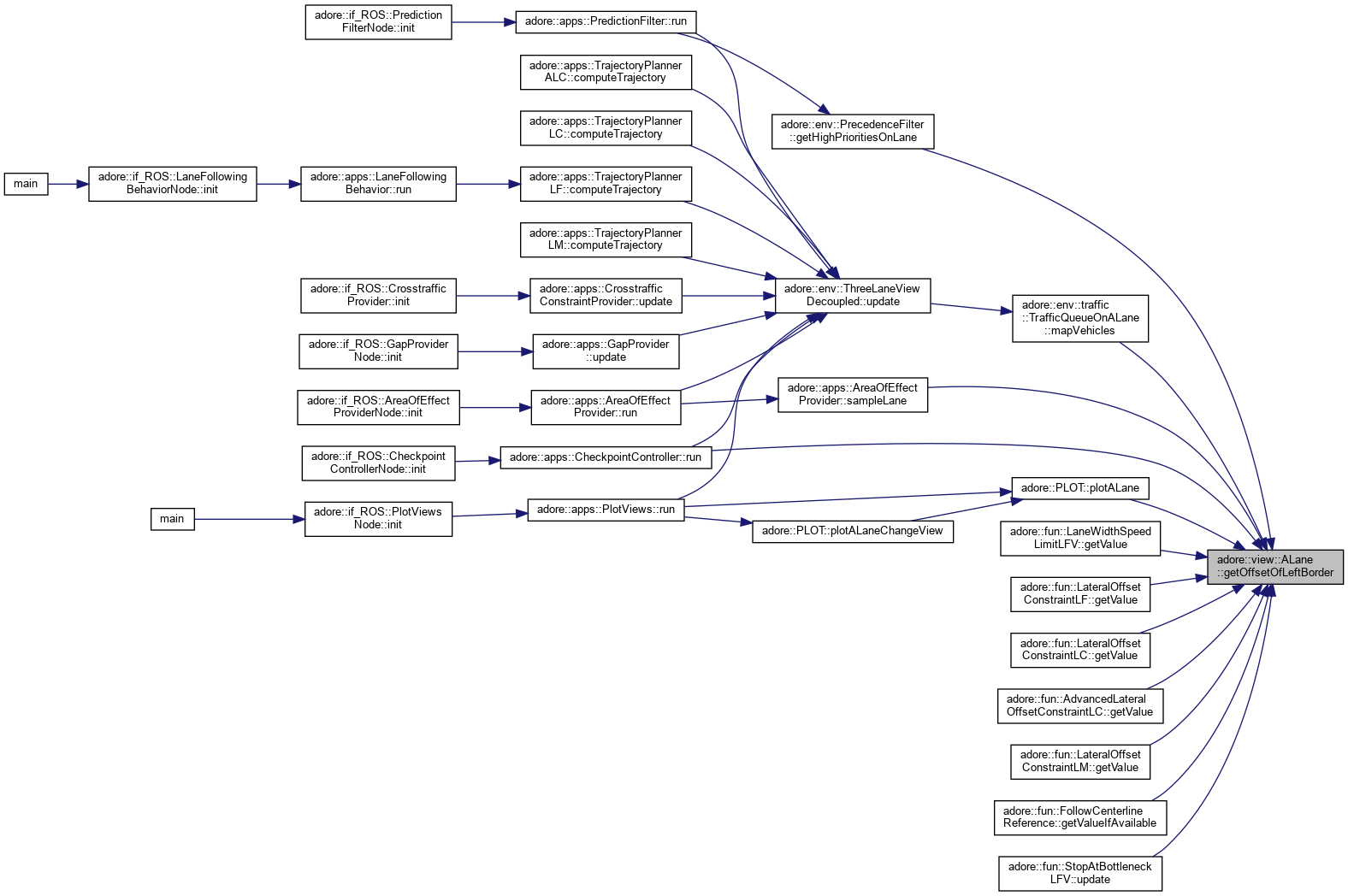
| virtual double | getOffsetOfLeftBorder (double s)=0 |
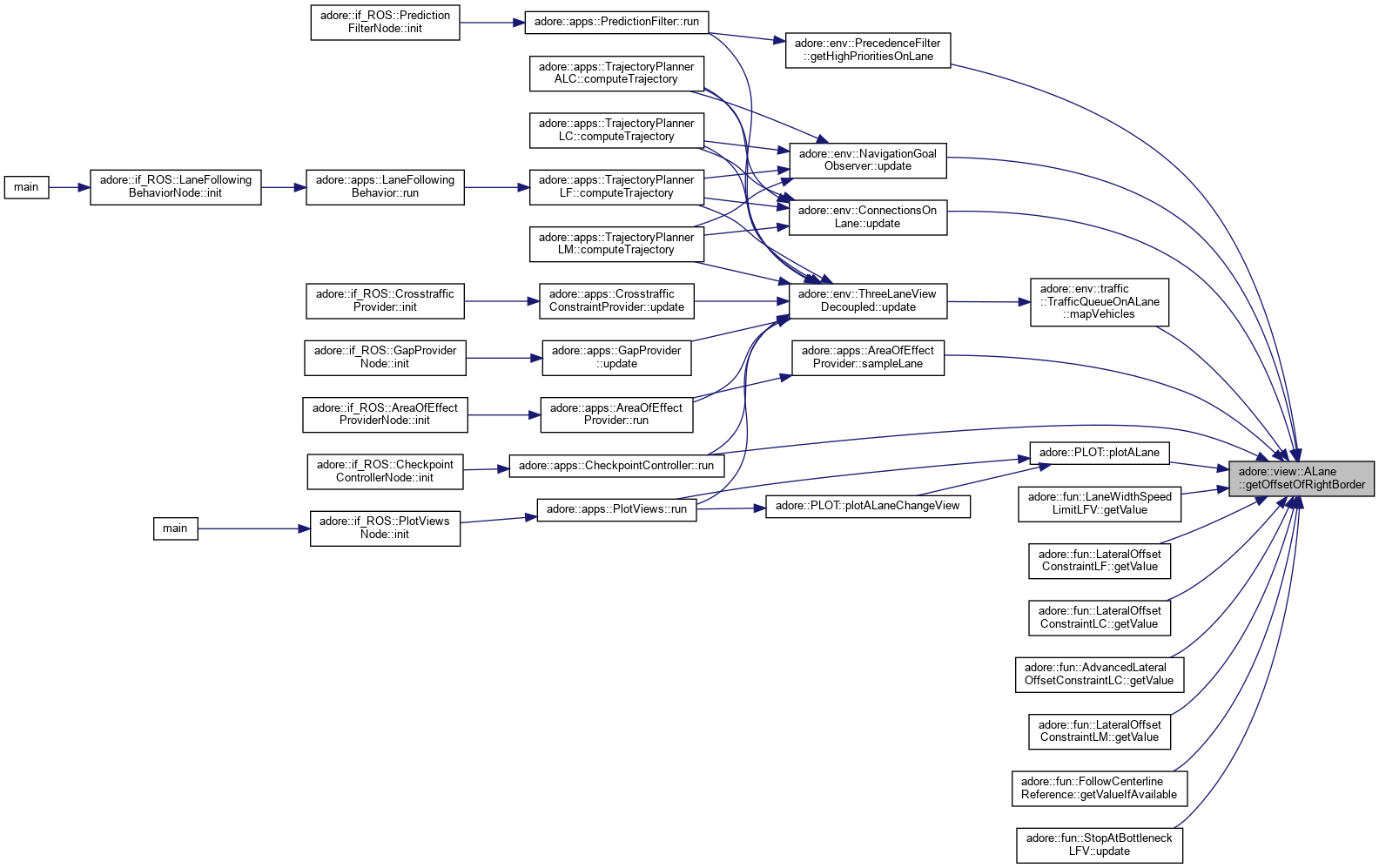
| virtual double | getOffsetOfRightBorder (double s)=0 |
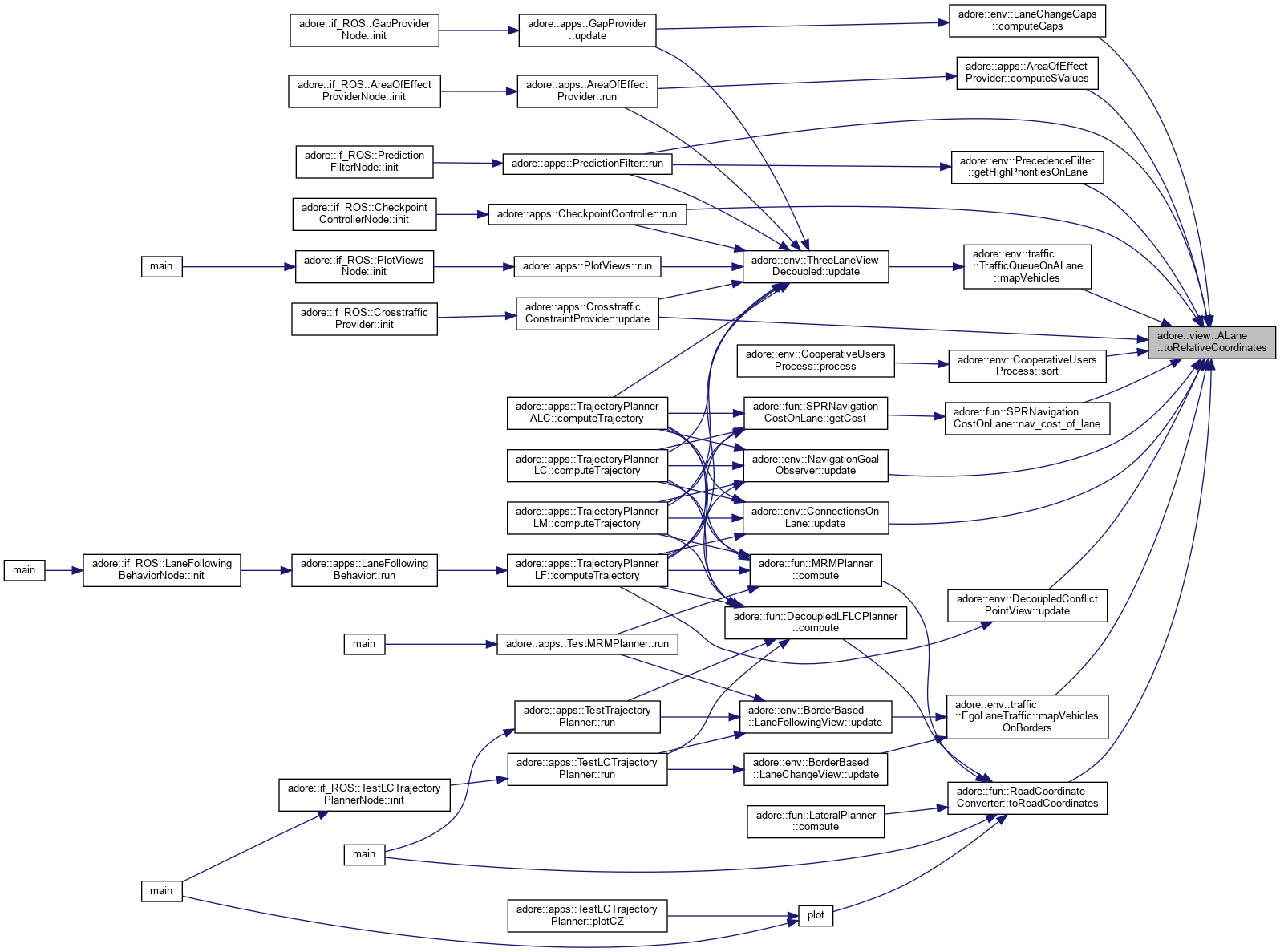
| virtual void | toRelativeCoordinates (double xe, double ye, double &s, double &n)=0 |
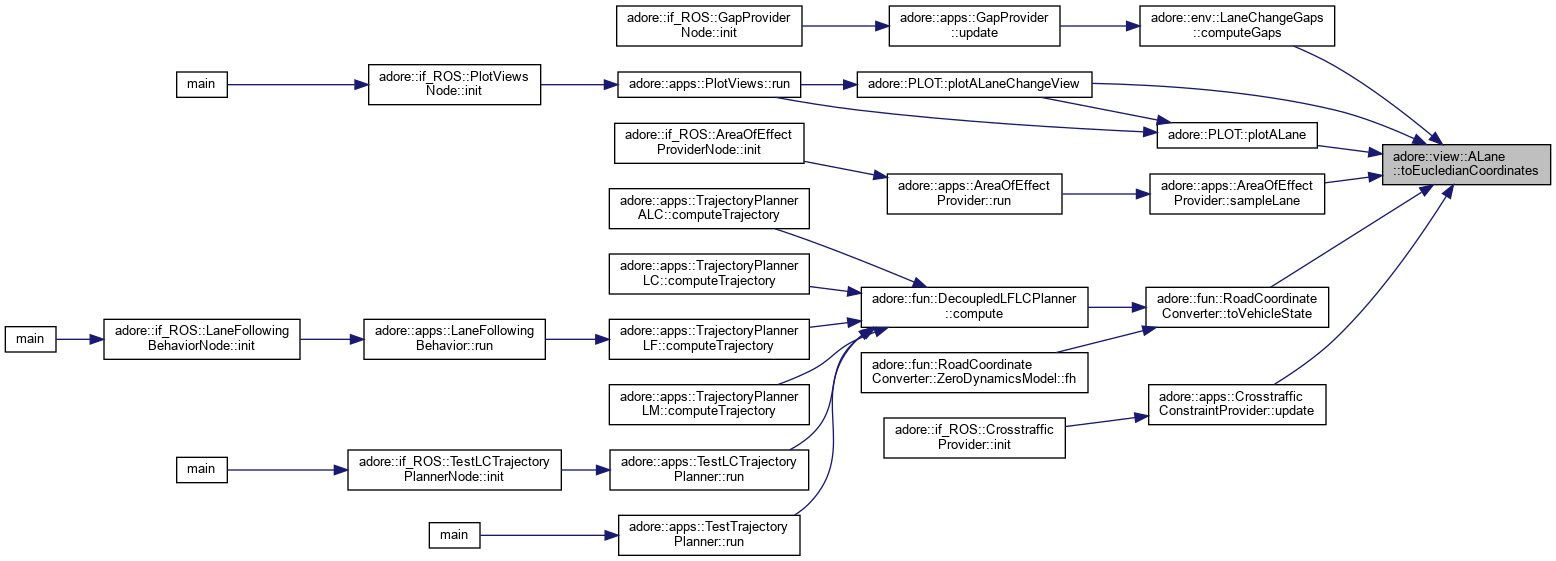
| virtual void | toEucledianCoordinates (double s, double n, double &xe, double &ye, double &ze)=0 |
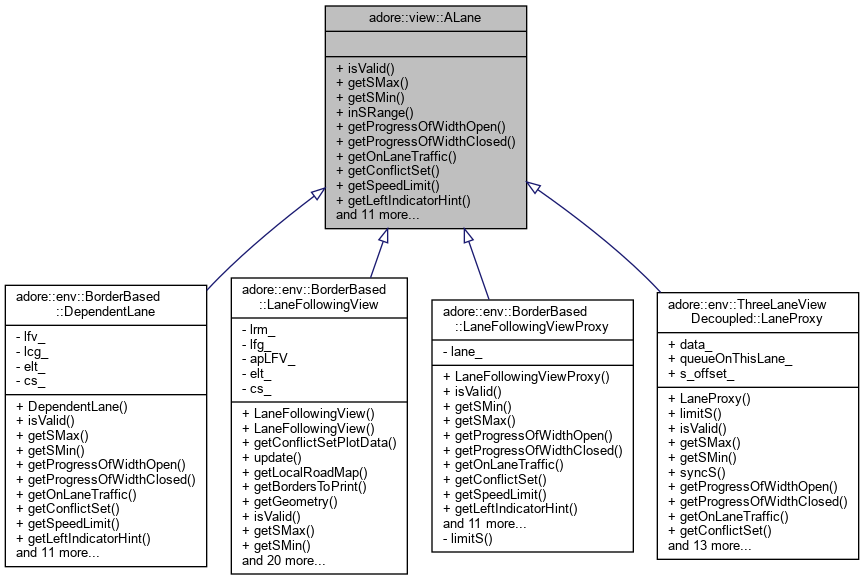
ALane - represents traffic and traffic rules for a lane. ALane uses a coordinate system (s,n), with s progress along the lane and n lateral offset, perpendicular to s.
|
pure virtual |
boundNavigationCost - return bounds for navigation-cost on a distance s interval along the lane
| cmin | the minimum cost on the interval is returned |
| cmax | the maximum cost on the interval is returned |
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.

|
pure virtual |
getConflictSet - return set of conflict zones, ordered by occurance along lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getCurvature - return the lane coordinate system's curvature kappa=1/R and its derivatives 1,2,... at a progress s the derivative is given as 1: d kappa / ds, 2: d^2 kappa / ds^2, ... if a derivative is unavailable, 0 will be returned
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getHeading - return the heading of the lane at a distance s along the lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getLeftIndicatorHint - return left indicator light hint at s along the lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getNavigationCost - return remaining navigation cost at a certain distance s along the lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getOffsetOfLeftBorder - return the lateral offset of the left border at a progress s
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getOffsetOfRightBorder - return the lateral offset of the right border at a progress s
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getOnLaneTraffic - return queue of traffic objects moving on lane, ordered by progress of objects on lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getProgressOfWidthClosed - return progress s, where target lane is no longer wide enough to contain AV
Implemented in adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, adore::env::BorderBased::DependentLane, and adore::env::ThreeLaneViewDecoupled::LaneProxy.
|
pure virtual |
getProgressOfWidthOpen - return progress s, where target lane is wide enough to contain AV for the first time
Implemented in adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, adore::env::BorderBased::DependentLane, and adore::env::ThreeLaneViewDecoupled::LaneProxy.
|
pure virtual |
getRightIndicatorHint - return right indicator light hint at s along the lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
getSpeedLimit - return the speed limit at a certain distance s along the lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.

|
pure virtual |
getSpeedRecommendation - return a speed recommendation at a certain distance s along the lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
hasSpeedRecommendation - return true, if a speed recommendation is available (GLOSA or other infrastructure advice) at a certain distance s along the lane
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
inline |
|
pure virtual |
isValid - return true if representation of lane is valid
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
coordinate transformation from road relative coordinates (s,n) to euclidean (xe,ye,ze)
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.
|
pure virtual |
coordinate transformation from euclidean (xe,ye) to road relative coordinates (s,n)
Implemented in adore::env::ThreeLaneViewDecoupled::LaneProxy, adore::env::BorderBased::LaneFollowingViewProxy, adore::env::BorderBased::LaneFollowingView, and adore::env::BorderBased::DependentLane.