|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <athreelaneview.h>
Public Member Functions | |
| virtual ALane * | getCurrentLane ()=0 |
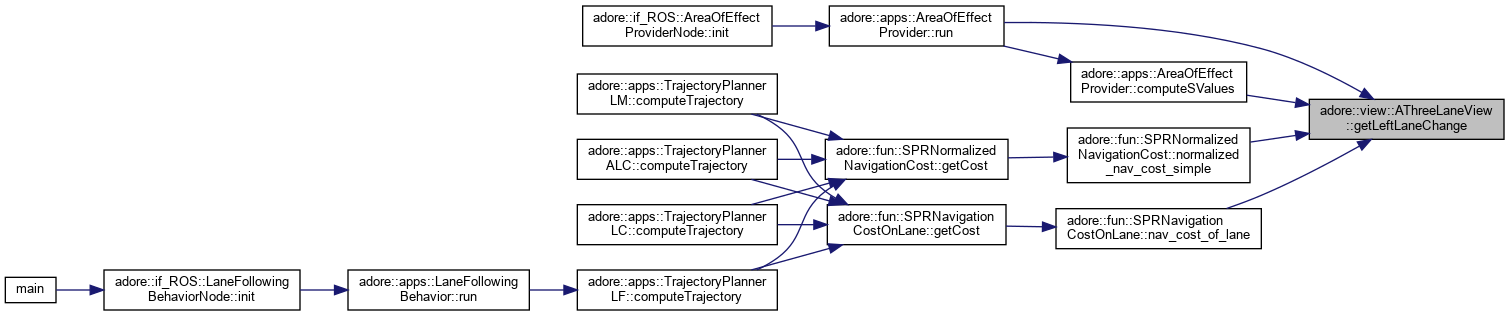
| virtual ALaneChangeView * | getLeftLaneChange ()=0 |
| virtual ALaneChangeView * | getRightLaneChange ()=0 |
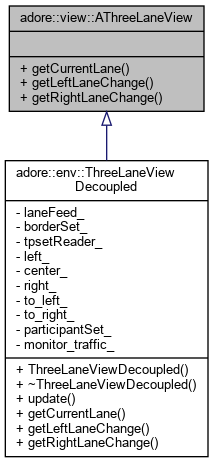
AThreeLaneView - A model / data abstraction useful for maneuver planning. For many autonomous driving applications it is sufficient to know the vehicle's current and the two adjacent lanes. AThreeLaneView is an interface, which promises to provide ALane interfaces for current, left and right lane, as well as ALaneChangeView interfaces for transitioning to left and right.
|
pure virtual |
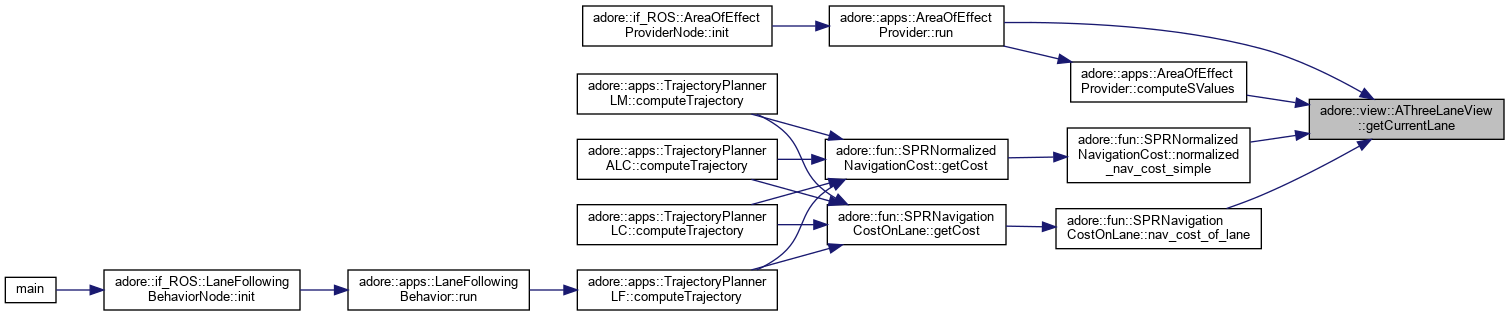
getCurrentLane - return ALane pointer the vehicle's current lane
Implemented in adore::env::ThreeLaneViewDecoupled.
|
pure virtual |
getLeftLaneChange - returns ALaneChangeView pointer to the lane left of the vehicle's current lane.
Implemented in adore::env::ThreeLaneViewDecoupled.
|
pure virtual |
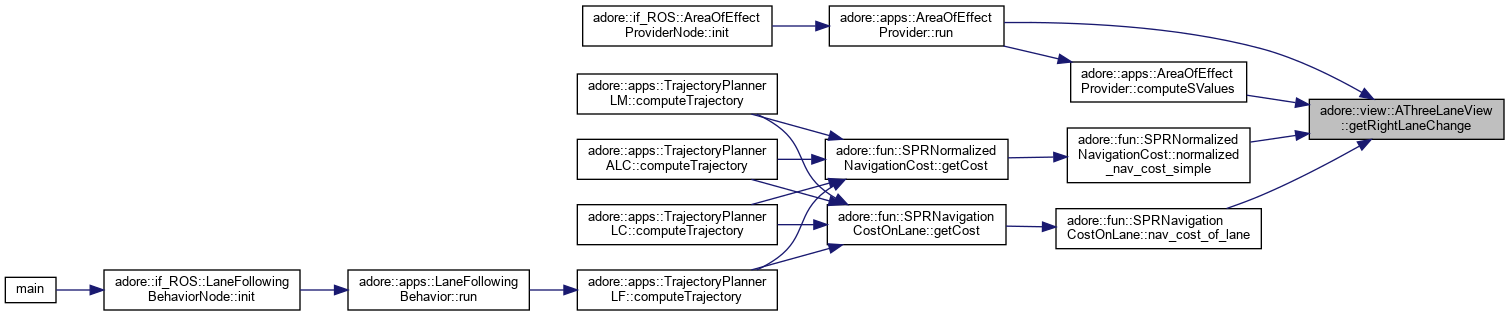
getRightLaneChange - returns ALaneChangeView pointer to the lane right of the vehicle's current lane.
Implemented in adore::env::ThreeLaneViewDecoupled.