|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
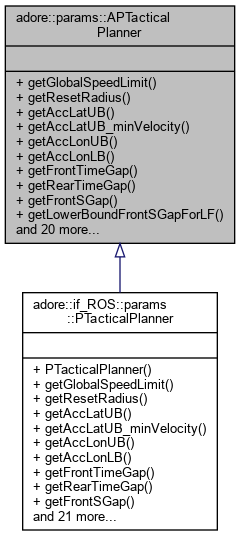
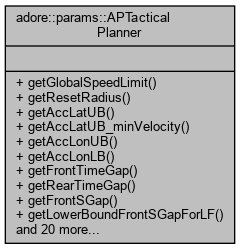
abstract classs containing parameters to configure aspects and constraints of the tactical planner More...
#include <ap_tactical_planner.h>
Public Member Functions | |
| virtual double | getGlobalSpeedLimit () const =0 |
| virtual double | getResetRadius () const =0 |
| virtual double | getAccLatUB () const =0 |
| virtual double | getAccLatUB_minVelocity () const =0 |
| virtual double | getAccLonUB () const =0 |
| virtual double | getAccLonLB () const =0 |
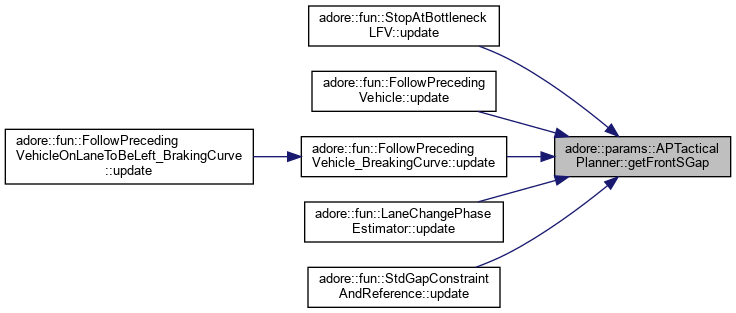
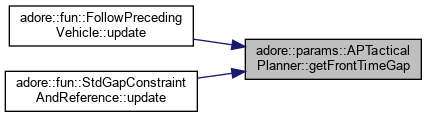
| virtual double | getFrontTimeGap () const =0 |
| virtual double | getRearTimeGap () const =0 |
| virtual double | getFrontSGap () const =0 |
| virtual double | getLowerBoundFrontSGapForLF () const =0 |
| virtual double | getRearSGap () const =0 |
| virtual double | getChaseReferenceOffset () const =0 |
| virtual double | getLeadReferenceOffset () const =0 |
| virtual double | getFrontReferenceOffset () const =0 |
| virtual double | getGapAlignment () const =0 |
| virtual double | getAssumedNominalAccelerationMinimum () const =0 |
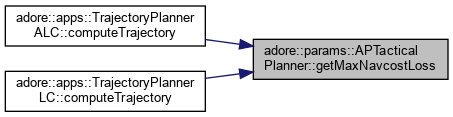
| virtual double | getMaxNavcostLoss () const =0 |
| virtual bool | getEnforceMonotonousNavigationCost () const =0 |
| virtual double | getTimeoutForPreferredLCAfterManuallySetIndicator () const =0 |
| virtual double | getLVResetVelocity () const =0 |
| virtual double | getTimeoutForLangechangeSuppression () const =0 |
| virtual double | getCollisionDetectionFrontBufferSpace () const =0 |
| virtual double | getCollisionDetectionLateralPrecision () const =0 |
| virtual double | getCollisionDetectionLateralError () const =0 |
| virtual double | getCollisionDetectionLongitudinalError () const =0 |
| virtual double | getNominalSwathAccelerationError () const =0 |
| virtual int | getCoercionPreventionStrategy () const =0 |
| getCoercionPreventionStrategy returns 0 switched off, 1 objective function, 2 constraint More... | |
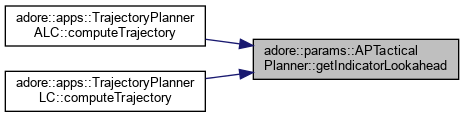
| virtual double | getIndicatorLookahead () const =0 |
| virtual double | getHorizonStopReferenceDistance () const =0 |
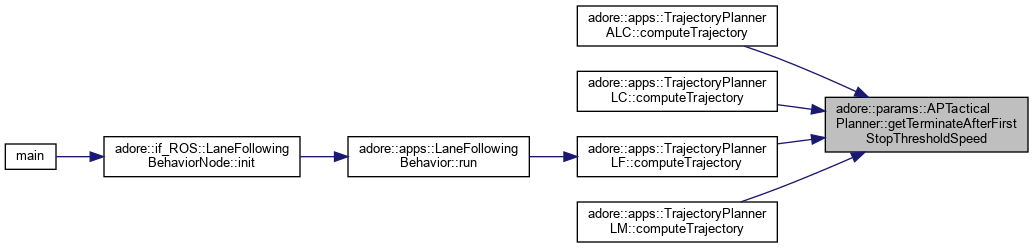
| virtual double | getTerminateAfterFirstStopThresholdSpeed () const =0 |
abstract classs containing parameters to configure aspects and constraints of the tactical planner
|
pure virtual |
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
getCoercionPreventionStrategy returns 0 switched off, 1 objective function, 2 constraint
Implemented in adore::if_ROS::params::PTacticalPlanner.

|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
|
pure virtual |
|
pure virtual |
distance before lanechange at which indicator is activated
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
vehicle threshold speed, at which maneuver is terminated,
Implemented in adore::if_ROS::params::PTacticalPlanner.
|
pure virtual |
|
pure virtual |