#include <planning_request.h>
◆ PlanningRequest()
| adore::fun::PlanningRequest::PlanningRequest |
( |
| ) |
|
|
inline |
◆ initial_state
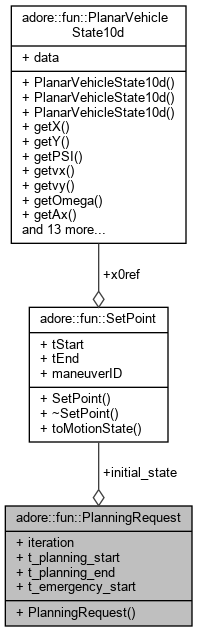
| SetPoint adore::fun::PlanningRequest::initial_state |
the initial state of the plan
◆ iteration
| long long int adore::fun::PlanningRequest::iteration |
◆ t_emergency_start
| double adore::fun::PlanningRequest::t_emergency_start |
◆ t_planning_end
| double adore::fun::PlanningRequest::t_planning_end |
terminate planning for given iteration at this time
◆ t_planning_start
| double adore::fun::PlanningRequest::t_planning_start |
The documentation for this struct was generated from the following file:
- /home/fascar/temp/adore/libadore/libadore/adore/fun/include/adore/fun/tac/planning_request.h