|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <connectionsonlane.h>
Classes | |
| struct | MappedConnection |
Public Member Functions | |
| virtual bool | hasLimitLine (double s0) override |
| virtual adore::view::LimitLine | getLimitLine (double t0, double s0) override |
| ConnectionsOnLane (adore::view::ALane *lane, adore::env::ControlledConnectionSet *conset) | |
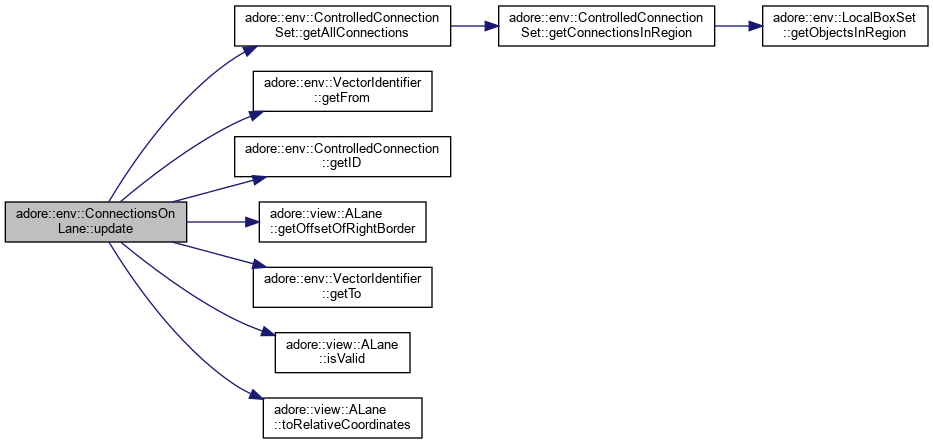
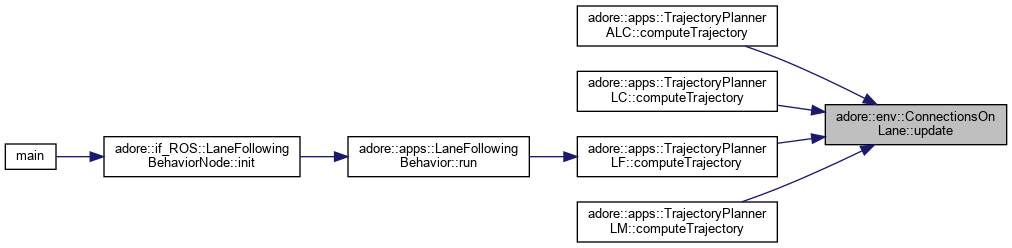
| void | update () |
Private Attributes | |
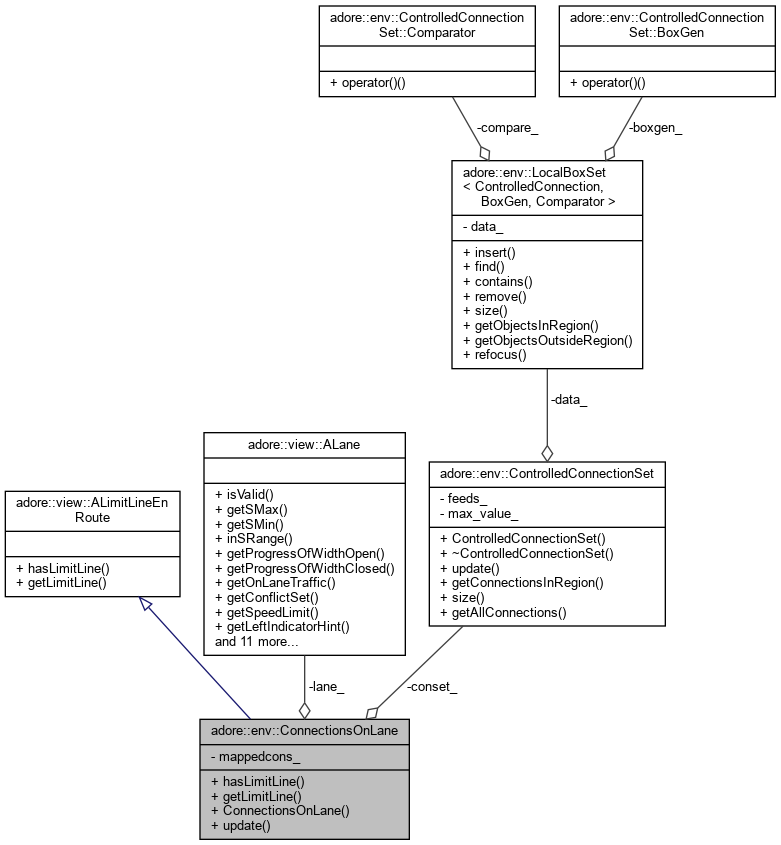
| adore::view::ALane * | lane_ |
| ControlledConnectionSet * | conset_ |
| std::vector< MappedConnection > | mappedcons_ |
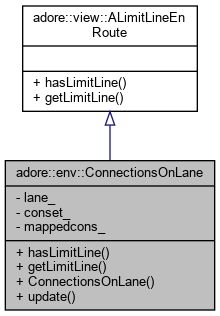
ConnectionsOnLane maps ControlledConnections ("signalized parts of the road") to a lane. ConnectionsOnLane also implements adore::view::ALimitLineEnRoute to provide a view
|
inline |
|
inlineoverridevirtual |
|
inlineoverridevirtual |
Implements adore::view::ALimitLineEnRoute.
|
inline |
(Re-)compute the mapping of connections to associated lane.
|
private |
the set of known connections
|
private |
the associated lane
|
private |
a list of connections on the lane