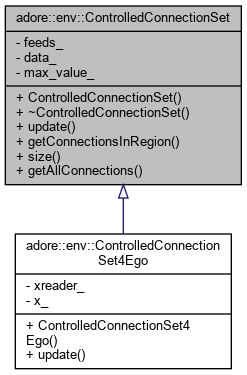
#include <controlledconnection.h>
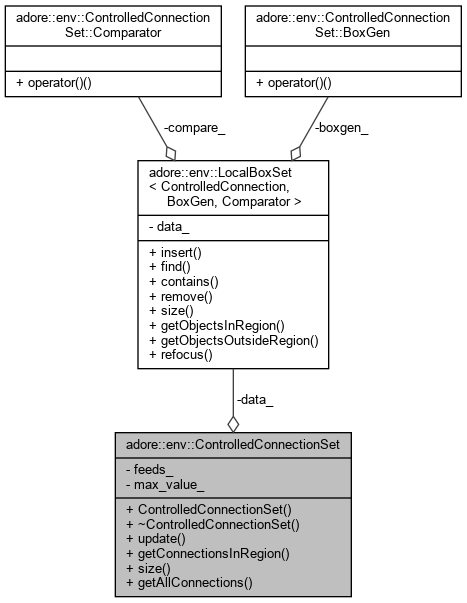
A set of ControlledConnection, maintained in an R-Tree for spatial access
◆ TConFeed
◆ TLocalBoxSet
◆ ControlledConnectionSet()
| adore::env::ControlledConnectionSet::ControlledConnectionSet |
( |
TConFeed * |
connection_feed, |
|
|
TConFeed * |
checkpoint_feed = nullptr |
|
) |
| |
|
inline |
Constructor for ControlledConnectionSet stores pointer to update feeds.
- Parameters
-
| connection_feed | required, traffic light information updates |
| checkpoint_feed | optional, connect to internal checkpoint updates: Use checkpoints only if required. For example a traffic prediction module must not connect to vehicle internal checkpoints. |
◆ ~ControlledConnectionSet()
| adore::env::ControlledConnectionSet::~ControlledConnectionSet |
( |
| ) |
|
|
inline |
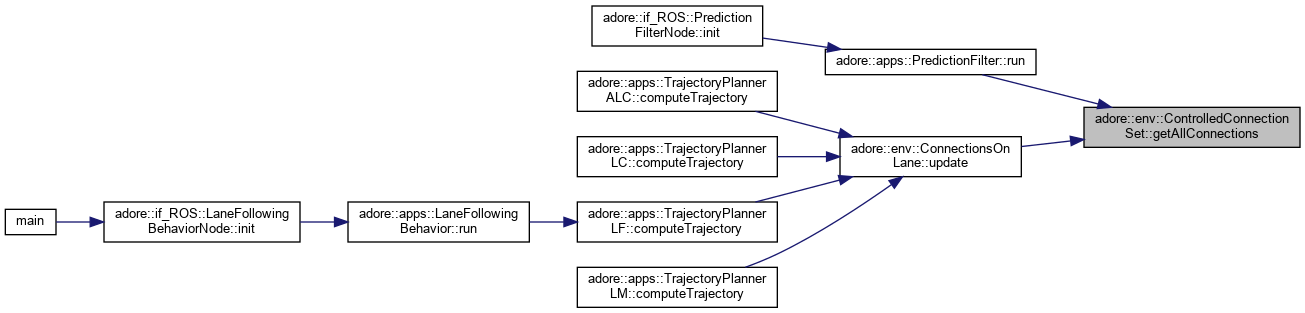
◆ getAllConnections()
| TLocalBoxSet::itpair adore::env::ControlledConnectionSet::getAllConnections |
( |
| ) |
|
|
inline |
◆ getConnectionsInRegion()
| TLocalBoxSet::itpair adore::env::ControlledConnectionSet::getConnectionsInRegion |
( |
double |
x0, |
|
|
double |
y0, |
|
|
double |
x1, |
|
|
double |
y1 |
|
) |
| |
|
inline |
◆ size()
| int adore::env::ControlledConnectionSet::size |
( |
| ) |
const |
|
inline |
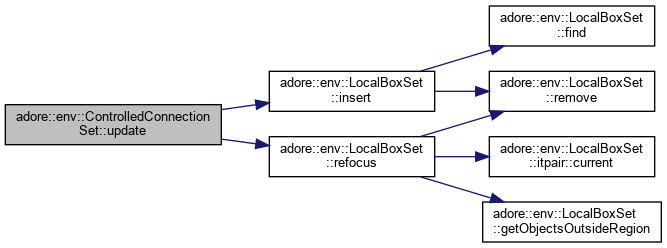
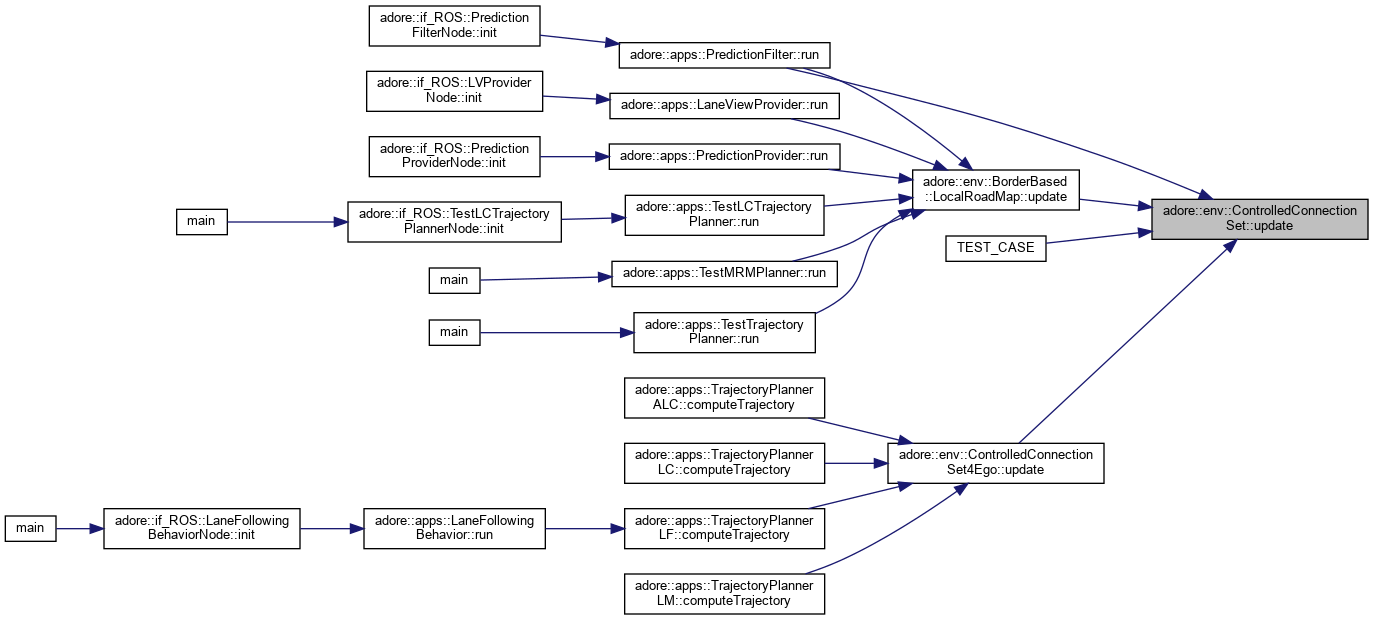
◆ update()
| virtual void adore::env::ControlledConnectionSet::update |
( |
double |
radius, |
|
|
double |
X, |
|
|
double |
Y |
|
) |
| |
|
inlinevirtual |
Update method accesses the controlled connection feed (trafficlight)
to maintain a set of information about controlled connections in the vicinity of the vehicle. Information for connections with distance bigger than radius to (X,Y) is discarded.
◆ data_
◆ feeds_
| std::vector<TConFeed*> adore::env::ControlledConnectionSet::feeds_ |
|
private |
◆ max_value_
| double adore::env::ControlledConnectionSet::max_value_ |
|
private |
The documentation for this class was generated from the following file: