|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <decoupledtrafficpredictionview.h>
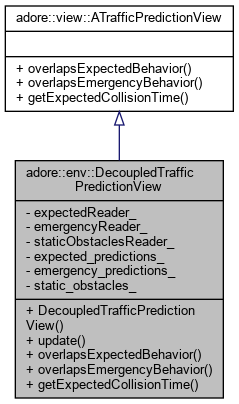
Public Member Functions | |
| DecoupledTrafficPredictionView (AFactory *factory=EnvFactoryInstance::get()) | |
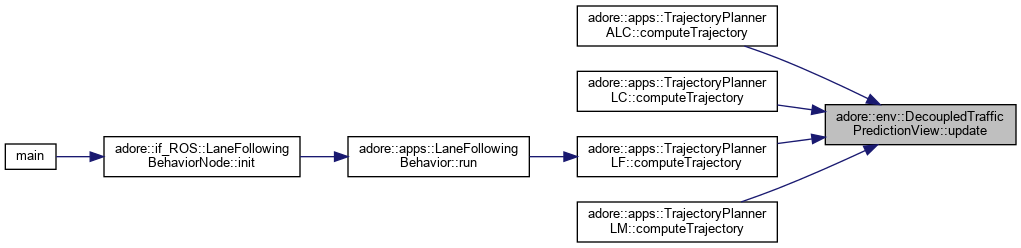
| void | update () |
| virtual bool | overlapsExpectedBehavior (const adore::mad::OccupancyCylinderTree &space) const override |
| virtual bool | overlapsEmergencyBehavior (const adore::mad::OccupancyCylinderTree &space) const override |
| virtual double | getExpectedCollisionTime (const adore::mad::OccupancyCylinderTree &space, double guard) const override |
|
inline |
|
inlineoverridevirtual |
getExpectedCollisionTime returns minimum time of all occuring collisions or guard if no collisions occur
Implements adore::view::ATrafficPredictionView.

|
inlineoverridevirtual |
overlapsEmergencyBehavior returns true if given space overlaps with current or future object positions belongig to the emergency behavior of these objects
Implements adore::view::ATrafficPredictionView.
|
inlineoverridevirtual |
overlapsExpectedBehavior returns true if given space overlaps with most likely current or future object positions
Implements adore::view::ATrafficPredictionView.
|
inline |
get latest prediction sets

|
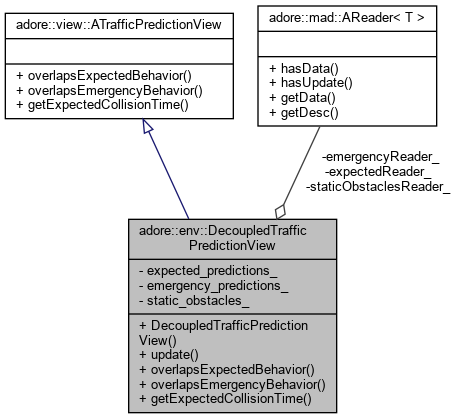
private |
|
private |
|
private |
|
private |
|
private |
|
private |