|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <adore/env/borderbased/borderset.h>#include <adore/env/borderbased/bordercostmap.h>#include <adore/env/borderbased/bordertrace.h>#include <adore/mad/llinearpiecewisefunction.h>#include <adore/mad/csvlog.h>#include <unordered_map>#include <list>#include <vector>#include <set>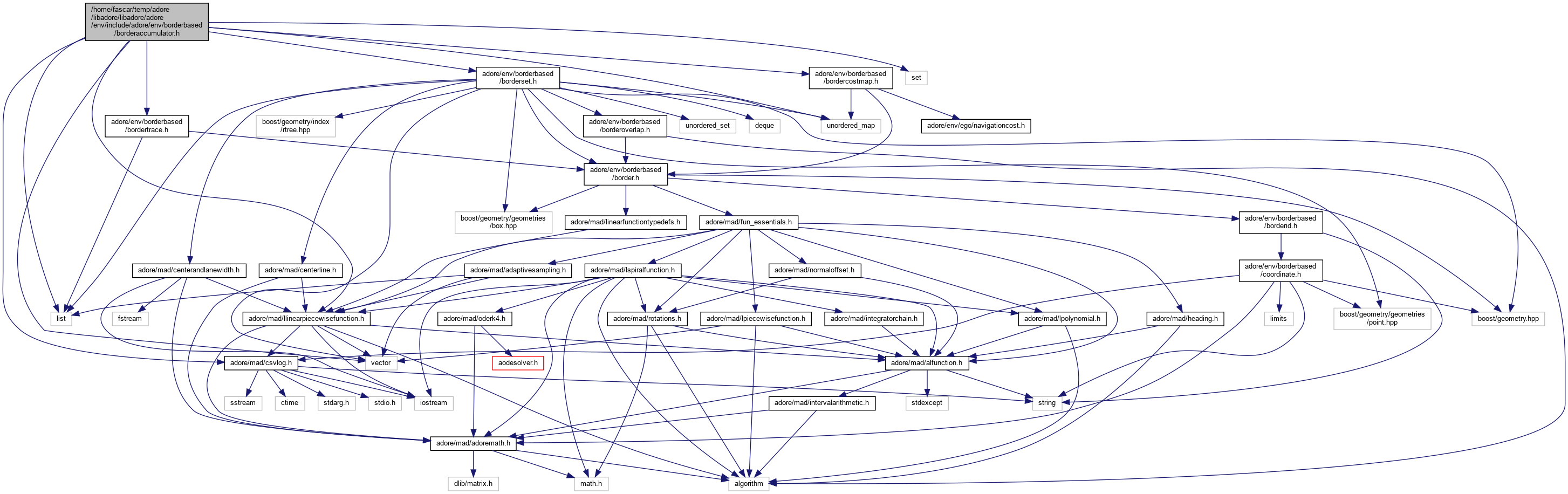

Go to the source code of this file.
Classes | |
| class | adore::env::BorderBased::BorderAccumulationStrategy |
| This class defines how successors of a border should be chosen. More... | |
| class | adore::env::BorderBased::BASFollowStraight |
| This class chooses the straightest successor of a border until an upper limit on distance is reached. More... | |
| class | adore::env::BorderBased::BASFollowNavigation |
| This class chooses the successor with the lowest cost until an upper limit on distance is reached. More... | |
| class | adore::env::BorderBased::BASNeighbor |
| This class choses the left/right neighbors of a border sequence. More... | |
| class | adore::env::BorderBased::BorderAccumulator |
| This class collects a sequence of borders, according to chosen BorderAccumulationStrategy. More... | |
Namespaces | |
| adore | |
| adore::env | |
| adore::env::BorderBased | |
Typedefs | |
| typedef std::vector< Border * > | adore::env::BorderBased::BAContainer |