|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <decoupledconflictpointview.h>
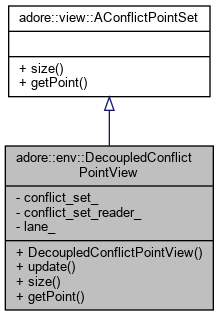
Public Member Functions | |
| DecoupledConflictPointView (adore::view::ALane *lane) | |
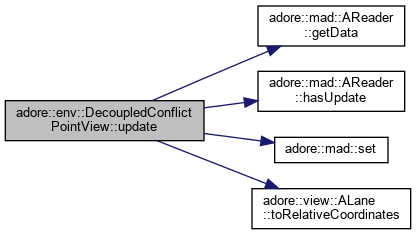
| void | update () |
| int | size () const override |
| adore::view::ConflictPoint | getPoint (int i) const override |
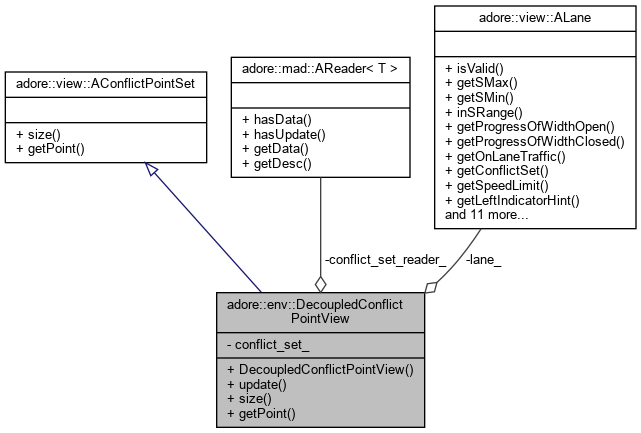
Private Attributes | |
| std::vector< adore::view::ConflictPoint > | conflict_set_ |
| adore::env::AFactory::TOCPredictionSetReader * | conflict_set_reader_ |
| adore::view::ALane * | lane_ |
|
inline |

|
inlineoverridevirtual |
Implements adore::view::AConflictPointSet.
|
inlineoverridevirtual |
Implements adore::view::AConflictPointSet.
|
inline |

|
private |
|
private |
|
private |