|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
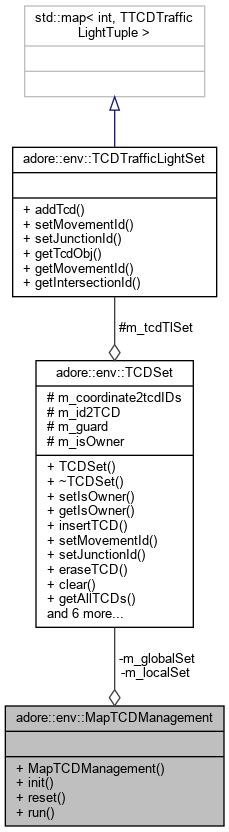
manage visible traffic control devices based on vehicle position and last state of the object More...
#include <map_tcd_management.h>
Public Member Functions | |
| MapTCDManagement () | |
| Construct a new Map T C D Management object. More... | |
| void | init (adore::env::TCDSet &globalSet) |
| initialization routine More... | |
| void | reset () |
| clear local set More... | |
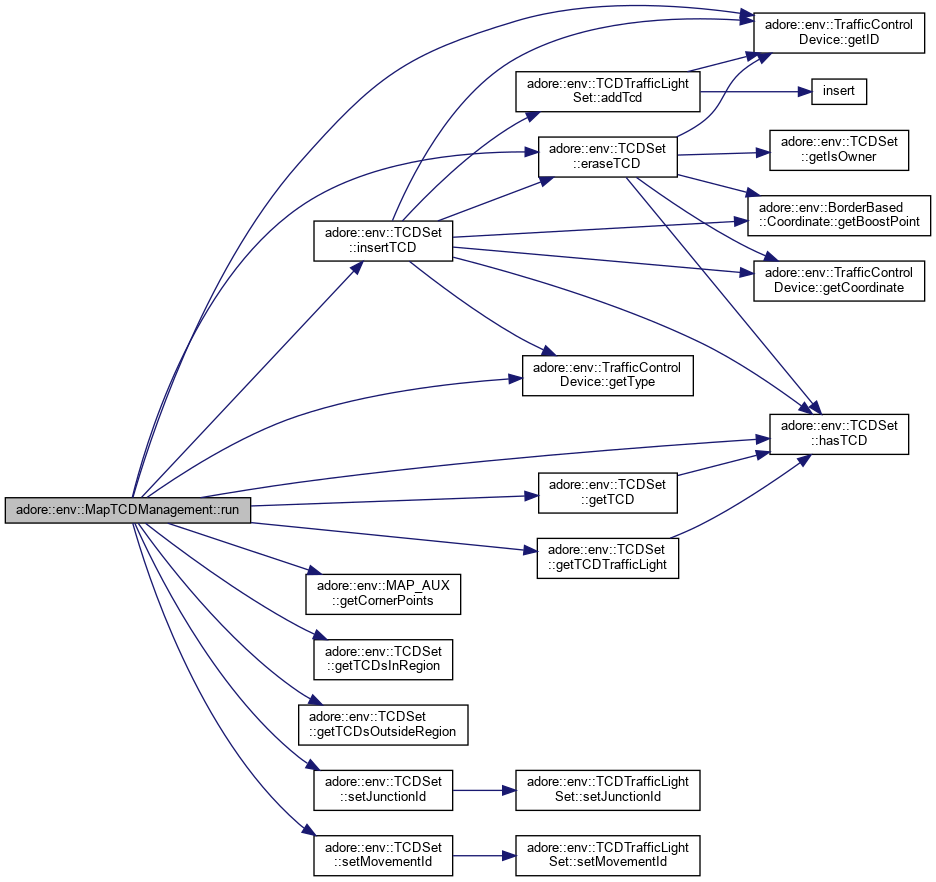
| void | run (double x, double y, double r, std::vector< adore::env::TrafficControlDevice * > &newTCD, std::vector< adore::env::TrafficControlDevice * > &outdatedTCD, std::vector< adore::env::TTCDTrafficLightTuple > &newTL, std::vector< adore::env::TTCDTrafficLightTuple > &outdatedTL, int MAX_NEW_NUMBER=5) |
| get new/outdated traffic control devices / traffic lights based on last object state and current vehicle position More... | |
Private Attributes | |
| adore::env::TCDSet | m_globalSet |
| adore::env::TCDSet | m_localSet |
manage visible traffic control devices based on vehicle position and last state of the object
|
inline |
Construct a new Map T C D Management object.

|
inline |
initialization routine
| globalSet |

|
inline |
clear local set

|
inline |
get new/outdated traffic control devices / traffic lights based on last object state and current vehicle position
| x | |
| y | |
| r | |
| newTCD | |
| outdatedTCD | |
| newTL | |
| outdatedTL | |
| MAX_NEW_NUMBER |
|
private |
|
private |