#include <velocityprediction.h>
|
| void | predict_s_tva (double s0, double v0, double a0, double delay, double a1, double vbound, double t0, double dt, double t1, adore::mad::LLinearPiecewiseFunctionM< double, 3 > &result) |
| |
| void | predict_s_tva (double s0, double v0, double a0, double vbound, double t0, double dt, double t1, adore::mad::LLinearPiecewiseFunctionM< double, 3 > &result) |
| |
| void | predict_t_sva (double s0, double v0, double a0, double vbound, double t0, double dt, double t1, adore::mad::LLinearPiecewiseFunctionM< double, 3 > &result) |
| |
| void | predict_t_sva (double s0, double v0, double a0, double delay, double a1, double vbound, double t0, double dt, double t1, adore::mad::LLinearPiecewiseFunctionM< double, 3 > &result) |
| |
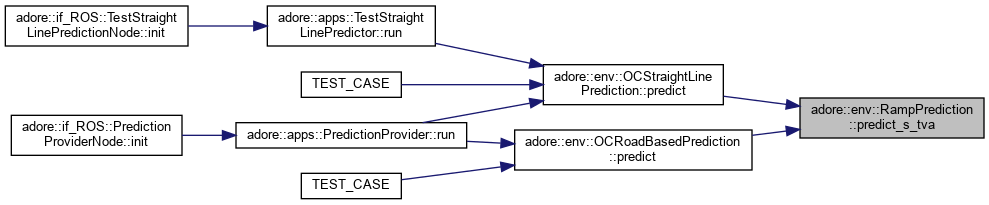
◆ predict_s_tva() [1/2]
| void adore::env::RampPrediction::predict_s_tva |
( |
double |
s0, |
|
|
double |
v0, |
|
|
double |
a0, |
|
|
double |
delay, |
|
|
double |
a1, |
|
|
double |
vbound, |
|
|
double |
t0, |
|
|
double |
dt, |
|
|
double |
t1, |
|
|
adore::mad::LLinearPiecewiseFunctionM< double, 3 > & |
result |
|
) |
| |
|
inline |
◆ predict_s_tva() [2/2]
| void adore::env::RampPrediction::predict_s_tva |
( |
double |
s0, |
|
|
double |
v0, |
|
|
double |
a0, |
|
|
double |
vbound, |
|
|
double |
t0, |
|
|
double |
dt, |
|
|
double |
t1, |
|
|
adore::mad::LLinearPiecewiseFunctionM< double, 3 > & |
result |
|
) |
| |
|
inline |
◆ predict_t_sva() [1/2]
| void adore::env::RampPrediction::predict_t_sva |
( |
double |
s0, |
|
|
double |
v0, |
|
|
double |
a0, |
|
|
double |
delay, |
|
|
double |
a1, |
|
|
double |
vbound, |
|
|
double |
t0, |
|
|
double |
dt, |
|
|
double |
t1, |
|
|
adore::mad::LLinearPiecewiseFunctionM< double, 3 > & |
result |
|
) |
| |
|
inline |
◆ predict_t_sva() [2/2]
| void adore::env::RampPrediction::predict_t_sva |
( |
double |
s0, |
|
|
double |
v0, |
|
|
double |
a0, |
|
|
double |
vbound, |
|
|
double |
t0, |
|
|
double |
dt, |
|
|
double |
t1, |
|
|
adore::mad::LLinearPiecewiseFunctionM< double, 3 > & |
result |
|
) |
| |
|
inline |
The documentation for this class was generated from the following file: