|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <evaluator_weighted_sum.h>
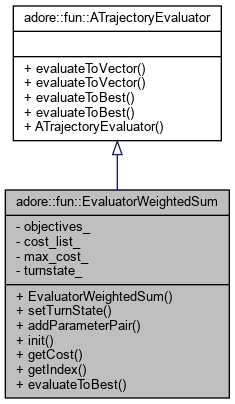
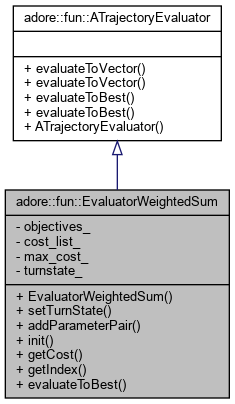
Public Member Functions | |
| EvaluatorWeightedSum () | |
| void | setTurnState (Turnstate state) |
| void | addParameterPair (std::string name, std::string weight_string) |
| void | init () |
| double | getCost (int id) |
| int | getIndex (int id) |
| int | evaluateToBest (const PlanningResultMap &planning_results) override |
 Public Member Functions inherited from adore::fun::ATrajectoryEvaluator Public Member Functions inherited from adore::fun::ATrajectoryEvaluator | |
| virtual std::vector< double > | evaluateToVector (const PlanningResultMap &planning_results, const std::vector< double > &weights) |
| virtual std::vector< double > | evaluateToVector (const PlanningResultMap &planning_results) |
| virtual int | evaluateToBest (const PlanningResultMap &planning_results, const std::vector< double > &weights) |
| ATrajectoryEvaluator () | |
Private Attributes | |
| std::vector< std::pair< std::string, double > > | objectives_ |
| std::vector< std::pair< int, double > > | cost_list_ |
| double | max_cost_ |
| Turnstate | turnstate_ |
A weighted sum of individual objective functions is used to select the best trajectory.
|
inline |
|
inline |

|
inlineoverridevirtual |
evaluate - assign navigation cost of last point in SetPointRequest
Reimplemented from adore::fun::ATrajectoryEvaluator.


|
inline |


|
inline |

|
inline |

|
inline |
|
private |
|
private |
|
private |
|
private |