|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
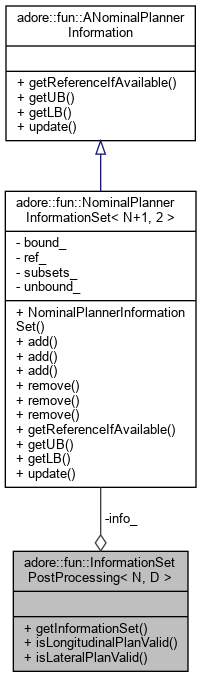
#include <informationsetpostprocessing.h>
Public Types | |
| typedef NominalPlannerInformationSet< N+1, 2 > | TInformationSet |
Public Member Functions | |
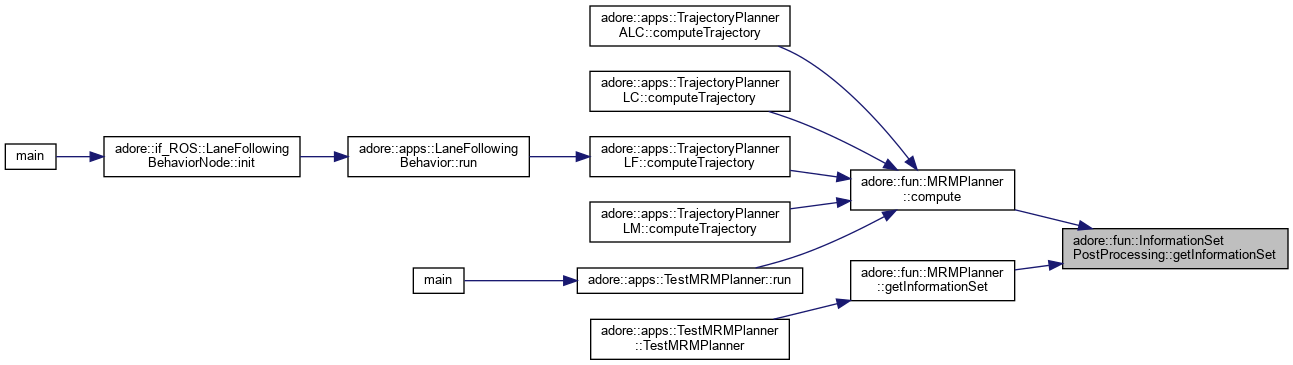
| TInformationSet & | getInformationSet () |
| template<int K> | |
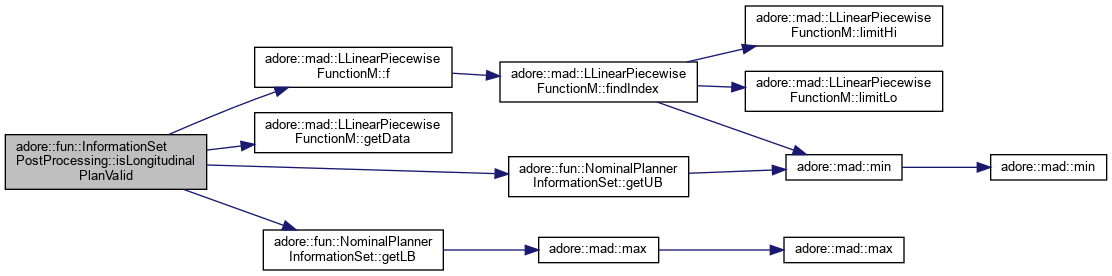
| bool | isLongitudinalPlanValid (double t0_offset, double s0_offset, adore::mad::LLinearPiecewiseFunctionM< double, K > *longitudinal_plan) |
| template<int K1, int K2> | |
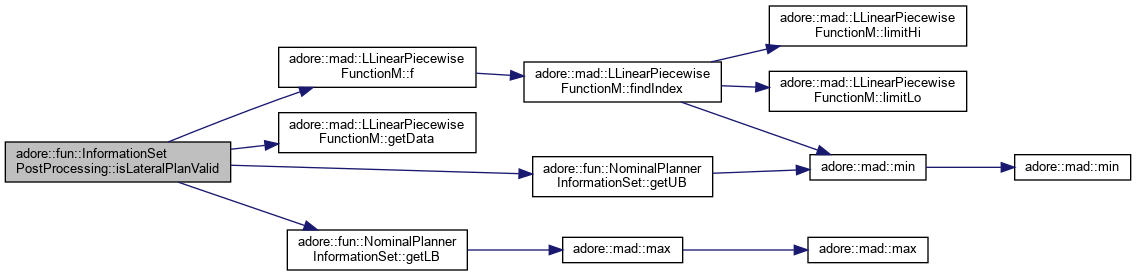
| bool | isLateralPlanValid (double t0_offset, double s0_offset, adore::mad::LLinearPiecewiseFunctionM< double, K1 > *longitudinal_plan, adore::mad::LLinearPiecewiseFunctionM< double, K2 > *lateral_plan) |
Private Attributes | |
| TInformationSet | info_ |
Usually, the constraints in the NominalPlannerInformationSet are pre-processed before trajectory optimization. Nonetheless, sometimes it might be convenient to apply the NominalConstraints in post-processing, after optimization. InformationSetPostProcessing applies NominalConstraints to finished plan and tests whether all constraints are satisfied. The finished plan has to be supplied in road-relvative coordinates, as all NominalConstraints are thus formulated. Template parameters direclty correspond to referenced NominalPlannerInformationSet.
| typedef NominalPlannerInformationSet<N+1,2> adore::fun::InformationSetPostProcessing< N, D >::TInformationSet |
|
inline |
|
inline |
Test the validity of a lateral plan. Returns true if valid. Test requires longitudinal and lateral plan for computation, but evaluates only lateral constraints.
| K1 | number of derivatives of longitudinal plan |
| K2 | number of derivatives of lateral plan |
| t0_offset | time offset of plan |
| s0_offset | longitudinal position offset of plan |
| longitudinal_plan | trajectory t->(s,s',s''...), where s is the component on the first axis of the road coordinate system |
| lateral_plan | trajectory t->(n,n',n''...), where n is the component on the second axis of the road coordinate system |
|
inline |
Test the validity of a longitudinal plan. Returns true if valid.
| K | number of derivatives given by longitudinal plan |
| t0_offset | time offset of plan |
| s0_offset | longitudinal position offset of plan |
| longitudinal_plan | trajectory t->(s,s',s''...), where s is the component on the first axis of the road coordinate system |
|
private |
the set of constraints, which are evaluated