|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <motioncommand.h>
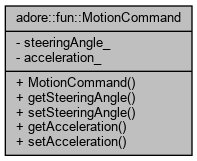
Public Member Functions | |
| MotionCommand () | |
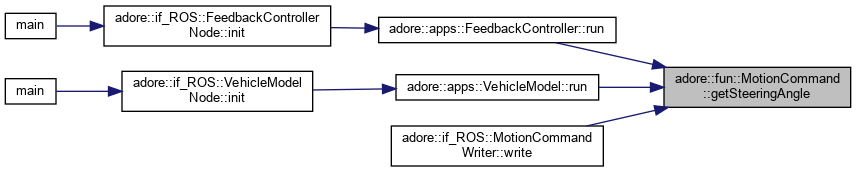
| double | getSteeringAngle () const |
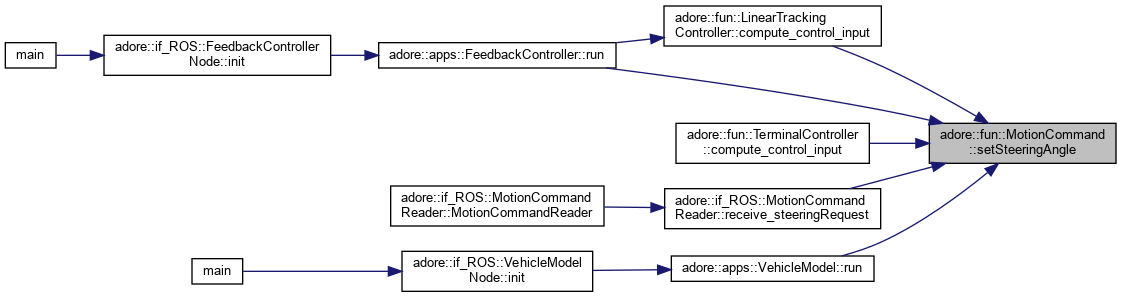
| void | setSteeringAngle (double steeringAngle) |
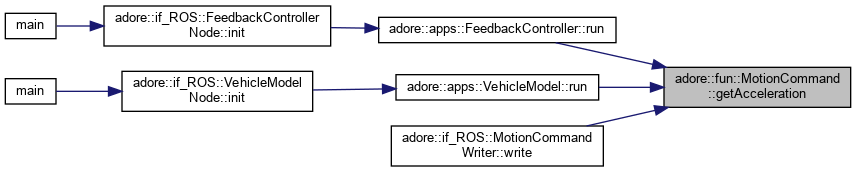
| double | getAcceleration () const |
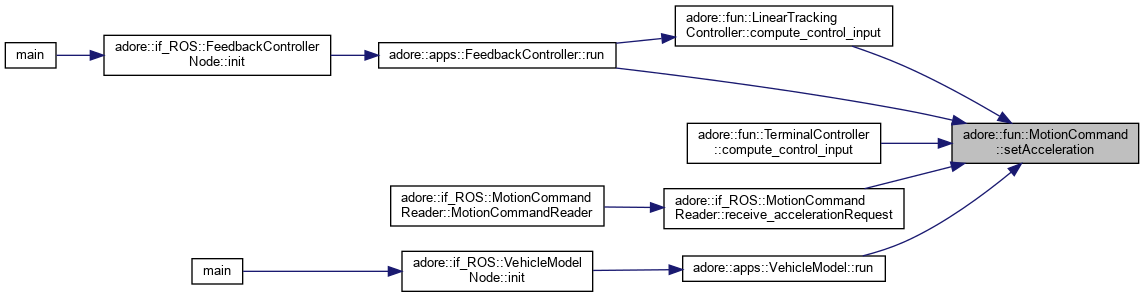
| void | setAcceleration (double acceleration) |
Private Attributes | |
| double | steeringAngle_ |
| double | acceleration_ |
Control input for vehicle motion. Assuming reference acceleration and steering angle are realized by lower level controllers.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
private |
|
private |