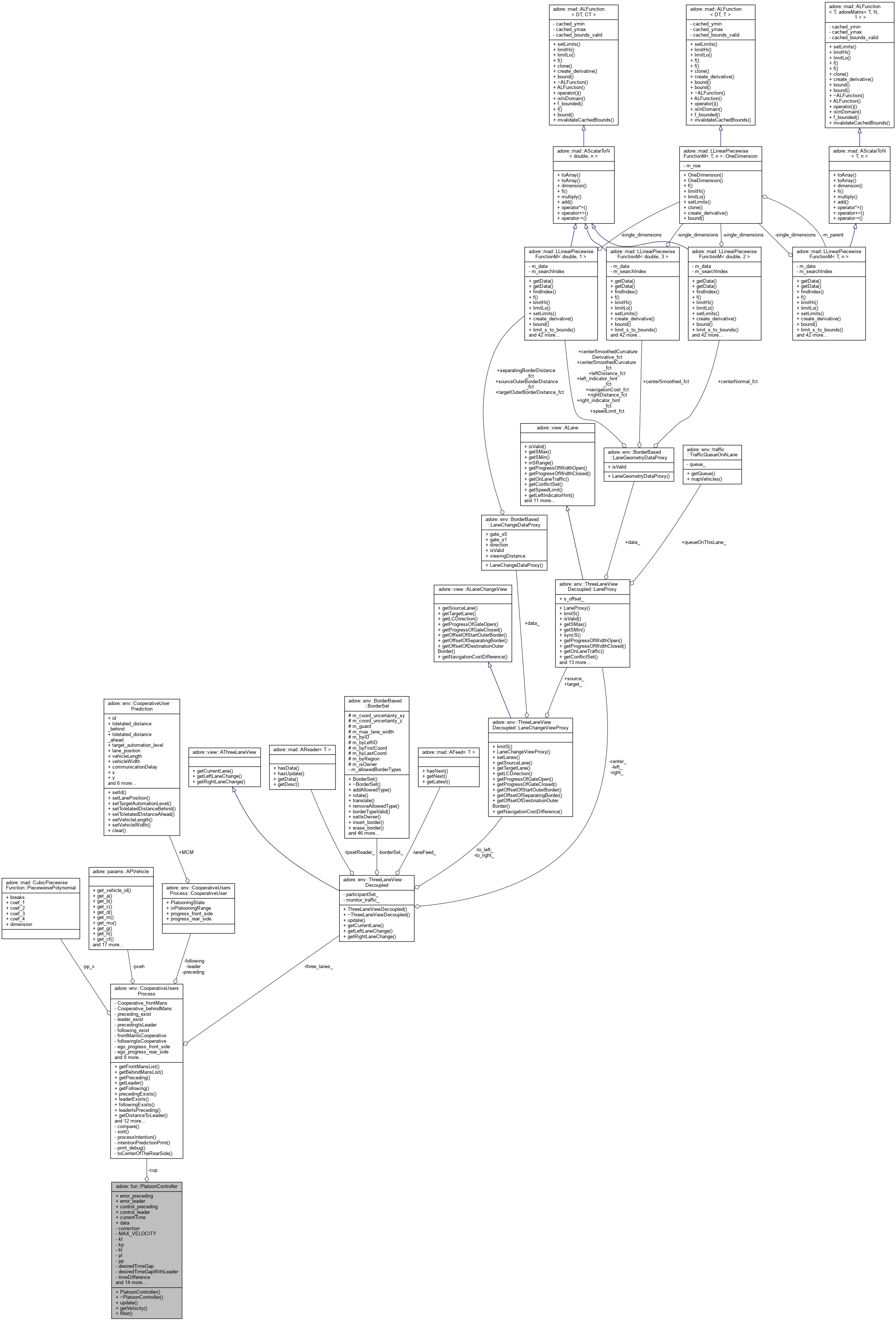
#include <platoon_controller.h>
◆ PlatoonController()
◆ ~PlatoonController()
| adore::fun::PlatoonController::~PlatoonController |
( |
| ) |
|
|
inline |
◆ filter()
| double adore::fun::PlatoonController::filter |
( |
double |
v | ) |
|
|
inline |
◆ getVelocity()
| double adore::fun::PlatoonController::getVelocity |
( |
| ) |
|
|
inline |
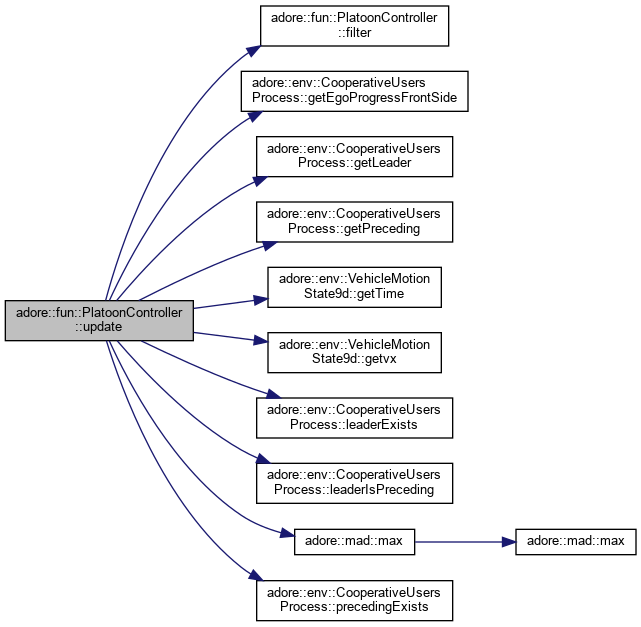
◆ update()
◆ control_leader
| double adore::fun::PlatoonController::control_leader |
◆ control_preceding
| double adore::fun::PlatoonController::control_preceding |
◆ correction
| double adore::fun::PlatoonController::correction |
|
private |
◆ cup
◆ currentErrorToLeader
| double adore::fun::PlatoonController::currentErrorToLeader |
|
private |
◆ currentErrorToPrecedor
| double adore::fun::PlatoonController::currentErrorToPrecedor |
|
private |
◆ currentTime
| double adore::fun::PlatoonController::currentTime |
◆ data
| Planner_data adore::fun::PlatoonController::data |
◆ desiredTimeGap
| double adore::fun::PlatoonController::desiredTimeGap |
|
private |
◆ desiredTimeGapWithLeader
| double adore::fun::PlatoonController::desiredTimeGapWithLeader |
|
private |
◆ error_I
| double adore::fun::PlatoonController::error_I |
|
private |
◆ error_leader
| double adore::fun::PlatoonController::error_leader |
◆ error_preceding
| double adore::fun::PlatoonController::error_preceding |
◆ k1
| double adore::fun::PlatoonController::k1 |
|
private |
◆ k2
| double adore::fun::PlatoonController::k2 |
|
private |
◆ k3
| double adore::fun::PlatoonController::k3 |
|
private |
◆ k4
| double adore::fun::PlatoonController::k4 |
|
private |
◆ kI
| double adore::fun::PlatoonController::kI |
|
private |
◆ kl
| double adore::fun::PlatoonController::kl |
|
private |
◆ kp
| double adore::fun::PlatoonController::kp |
|
private |
◆ MAX_VELOCITY
| double adore::fun::PlatoonController::MAX_VELOCITY |
|
private |
◆ pl
| double adore::fun::PlatoonController::pl |
|
private |
◆ pp
| double adore::fun::PlatoonController::pp |
|
private |
◆ previousErrorToLeader
| double adore::fun::PlatoonController::previousErrorToLeader |
|
private |
◆ previousErrorToPrecedor
| double adore::fun::PlatoonController::previousErrorToPrecedor |
|
private |
◆ suggested_velocity
| double adore::fun::PlatoonController::suggested_velocity |
|
private |
◆ timeDifference
| double adore::fun::PlatoonController::timeDifference |
|
private |
◆ v1
| double adore::fun::PlatoonController::v1 |
|
private |
◆ v2
| double adore::fun::PlatoonController::v2 |
|
private |
◆ v3
| double adore::fun::PlatoonController::v3 |
|
private |
◆ velocity
| double adore::fun::PlatoonController::velocity |
|
private |
The documentation for this class was generated from the following file: