#include <turn_signal_observer.h>
◆ TurnSignalObserver()
| adore::fun::TurnSignalObserver::TurnSignalObserver |
( |
| ) |
|
|
inline |
◆ ~TurnSignalObserver()
| adore::fun::TurnSignalObserver::~TurnSignalObserver |
( |
| ) |
|
|
inline |
◆ bothIndicatorsOn()
| bool adore::fun::TurnSignalObserver::bothIndicatorsOn |
( |
double |
t = -1.0 | ) |
const |
|
inline |
◆ leftIndicatorTurnedOnManuallyWithinLastSecond()
| bool adore::fun::TurnSignalObserver::leftIndicatorTurnedOnManuallyWithinLastSecond |
( |
double |
current_time, |
|
|
double |
max_delay = 1.0 |
|
) |
| |
|
inline |
◆ leftIndicatorTurnedOnWithinLastSecond()
| bool adore::fun::TurnSignalObserver::leftIndicatorTurnedOnWithinLastSecond |
( |
double |
current_time, |
|
|
double |
max_delay = 1.0 |
|
) |
| |
|
inline |
◆ newLeftIndicatorOnEvent()
| bool adore::fun::TurnSignalObserver::newLeftIndicatorOnEvent |
( |
| ) |
|
|
inline |
◆ newManualLeftIndicatorOnEvent()
| bool adore::fun::TurnSignalObserver::newManualLeftIndicatorOnEvent |
( |
| ) |
|
|
inline |
◆ newManualRightIndicatorOnEvent()
| bool adore::fun::TurnSignalObserver::newManualRightIndicatorOnEvent |
( |
| ) |
|
|
inline |
◆ newRightIndicatorOnEvent()
| bool adore::fun::TurnSignalObserver::newRightIndicatorOnEvent |
( |
| ) |
|
|
inline |
◆ rightIndicatorTurnedOnManuallyWithinLastSecond()
| bool adore::fun::TurnSignalObserver::rightIndicatorTurnedOnManuallyWithinLastSecond |
( |
double |
current_time, |
|
|
double |
max_delay = 1.0 |
|
) |
| |
|
inline |
◆ rightIndicatorTurnedOnWithinLastSecond()
| bool adore::fun::TurnSignalObserver::rightIndicatorTurnedOnWithinLastSecond |
( |
double |
current_time, |
|
|
double |
max_delay = 1.0 |
|
) |
| |
|
inline |
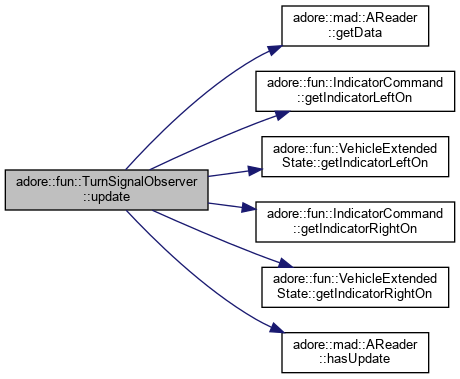
◆ update()
| void adore::fun::TurnSignalObserver::update |
( |
double |
t | ) |
|
|
inline |
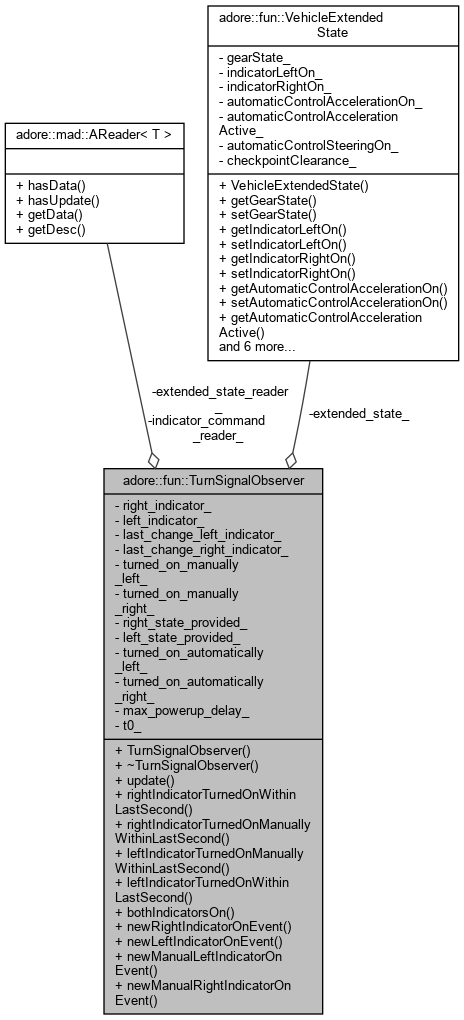
◆ extended_state_
◆ extended_state_reader_
◆ indicator_command_reader_
◆ last_change_left_indicator_
| double adore::fun::TurnSignalObserver::last_change_left_indicator_ |
|
private |
◆ last_change_right_indicator_
| double adore::fun::TurnSignalObserver::last_change_right_indicator_ |
|
private |
◆ left_indicator_
| bool adore::fun::TurnSignalObserver::left_indicator_ |
|
private |
◆ left_state_provided_
| bool adore::fun::TurnSignalObserver::left_state_provided_ |
|
private |
◆ max_powerup_delay_
| double adore::fun::TurnSignalObserver::max_powerup_delay_ |
|
private |
◆ right_indicator_
| bool adore::fun::TurnSignalObserver::right_indicator_ |
|
private |
◆ right_state_provided_
| bool adore::fun::TurnSignalObserver::right_state_provided_ |
|
private |
◆ t0_
| double adore::fun::TurnSignalObserver::t0_ |
|
private |
◆ turned_on_automatically_left_
| double adore::fun::TurnSignalObserver::turned_on_automatically_left_ |
|
private |
◆ turned_on_automatically_right_
| double adore::fun::TurnSignalObserver::turned_on_automatically_right_ |
|
private |
◆ turned_on_manually_left_
| bool adore::fun::TurnSignalObserver::turned_on_manually_left_ |
|
private |
◆ turned_on_manually_right_
| bool adore::fun::TurnSignalObserver::turned_on_manually_right_ |
|
private |
The documentation for this class was generated from the following file: