|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
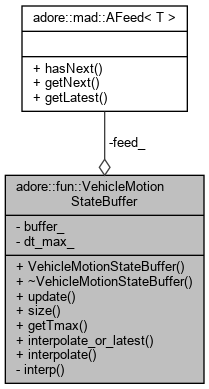
Buffers and interpolates vehicle positions. More...
#include <vehiclemotionstatebuffer.h>
Public Member Functions | |
| VehicleMotionStateBuffer (adore::fun::AFactory::TMotionStateFeed *feed, double dt_max=1.0) | |
| ~VehicleMotionStateBuffer () | |
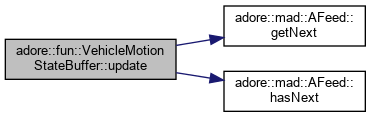
| void | update () |
| call update to check for new data More... | |
| double | size () |
| double | getTmax () |
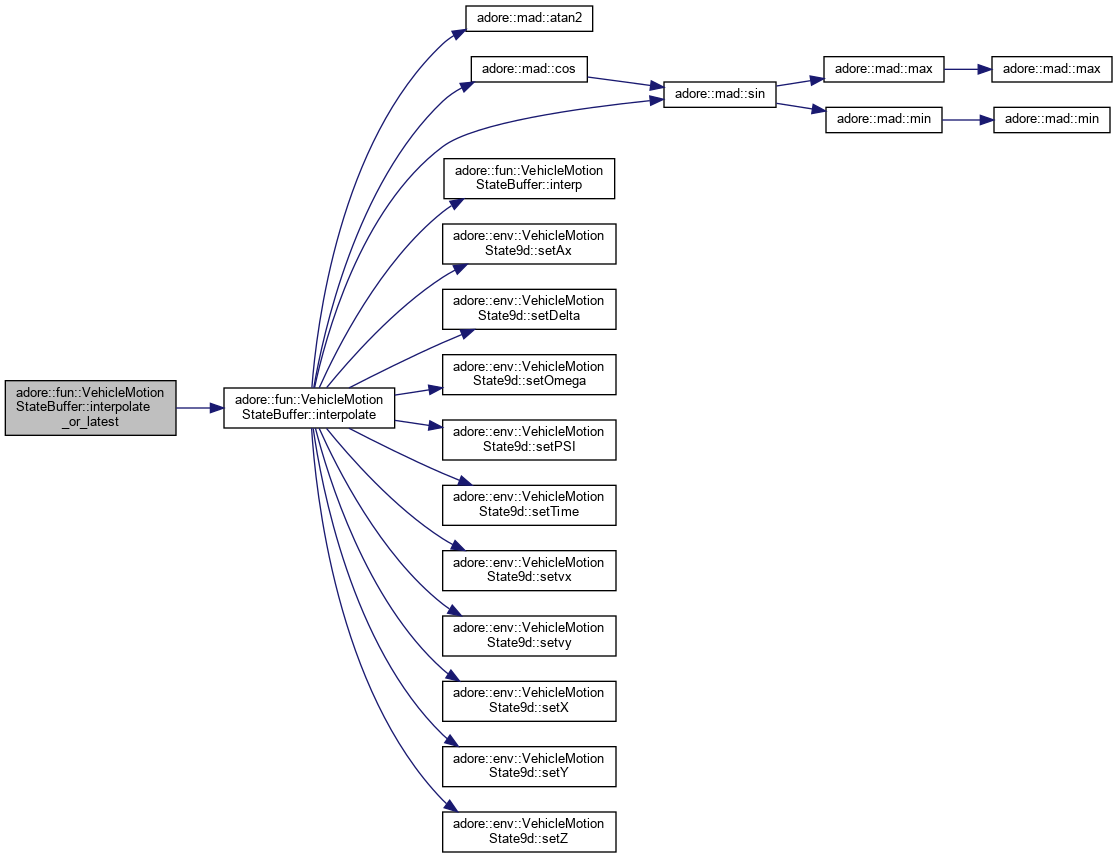
| bool | interpolate_or_latest (double t, VehicleMotionState9d &result) |
| get the latest, if More... | |
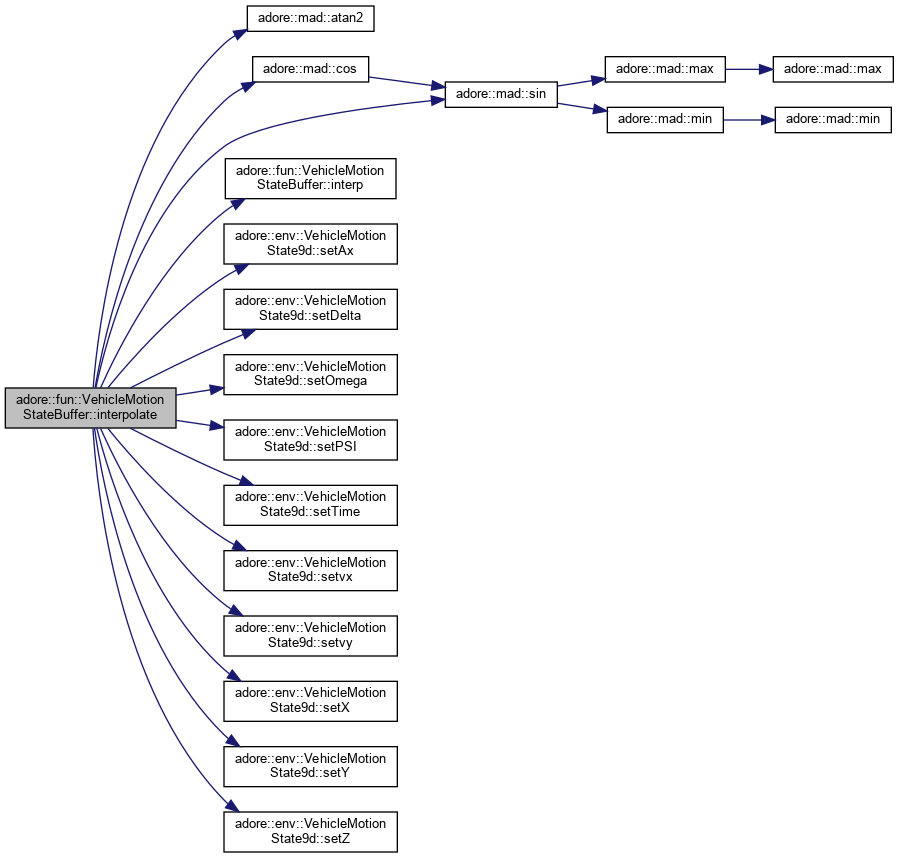
| bool | interpolate (double t, VehicleMotionState9d &result) |
| interpolate a value for time t, if t is in buffered time range More... | |
Private Member Functions | |
| double | interp (double t, double ta, double a, double tb, double b) |
Private Attributes | |
| adore::fun::AFactory::TMotionStateFeed * | feed_ |
| std::list< VehicleMotionState9d > | buffer_ |
| double | dt_max_ |
Buffers and interpolates vehicle positions.
|
inline |
|
inline |
|
inline |


|
inlineprivate |

|
inline |
interpolate a value for time t, if t is in buffered time range

|
inline |
get the latest, if
| t | is bigger than latest known time point. Otherwise interpolate. |

|
inline |

|
inline |
call update to check for new data

|
private |
|
private |
|
private |