|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <missiondataconverter.h>
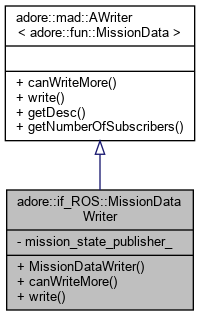
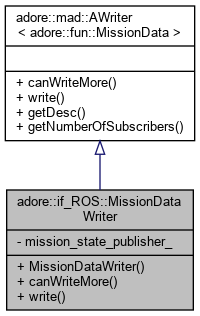
Public Member Functions | |
| MissionDataWriter (ros::NodeHandle *n, const std::string &mission_state_topic, int qsize) | |
| virtual bool | canWriteMore () const override |
| virtual void | write (const adore::fun::MissionData &value) override |
 Public Member Functions inherited from adore::mad::AWriter< adore::fun::MissionData > Public Member Functions inherited from adore::mad::AWriter< adore::fun::MissionData > | |
| virtual std::string | getDesc () |
| virtual uint32_t | getNumberOfSubscribers () const |
Private Attributes | |
| ros::Publisher | mission_state_publisher_ |
ROS specific implementation of AWriter for adore::fun::MissionData. Transmits a adore::fun::MissionData by sending ROS std_msgs.
|
inline |
|
inlineoverridevirtual |
canWriteMore indicates whether more data can be written
Implements adore::mad::AWriter< adore::fun::MissionData >.
|
inlineoverridevirtual |
write sends out data value
Implements adore::mad::AWriter< adore::fun::MissionData >.

|
private |