|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <vector>#include <tuple>#include <algorithm>#include <adore/env/borderbased/coordinate.h>#include <adore/env/borderbased/border.h>#include <adore/mad/csvlog.h>#include <adore/mad/llinearpiecewisefunction.h>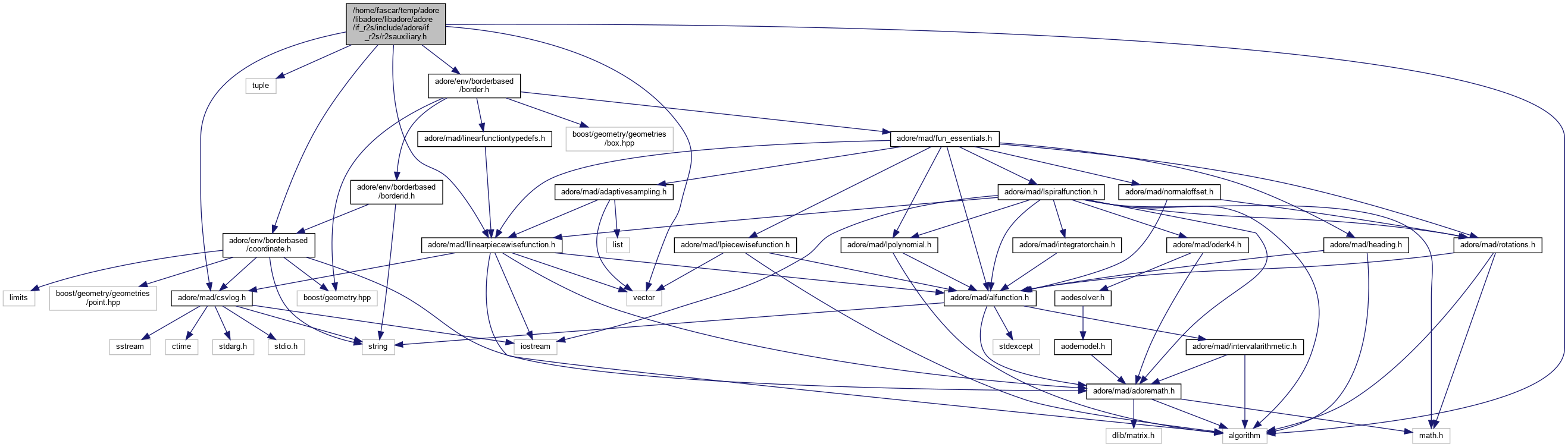
Go to the source code of this file.
Classes | |
| struct | adore::if_r2s::ReferenceLine |
| basic storage struct for ReferenceLine from file More... | |
| struct | adore::if_r2s::LaneBorder |
| basic storage struct for lane borders from file More... | |
| class | adore::if_r2s::Section |
| directed borders, ordered from center line to outer border More... | |
| class | adore::if_r2s::Section::FunctionMap |
| storage class to access different functions by their domain intervals More... | |
Namespaces | |
| adore | |
| adore::if_r2s | |
Typedefs | |
| typedef std::vector< adore::env::BorderBased::Coordinate > | adore::if_r2s::TR2SGeometry |
| typedef std::vector< ReferenceLine > | adore::if_r2s::TReferenceLineVector |
| typedef std::vector< LaneBorder > | adore::if_r2s::TLaneBorderVector |
| typedef adore::mad::LLinearPiecewiseFunctionM< double, 2 > | adore::if_r2s::TGeometryFunction |
| typedef std::pair< TGeometryFunction *, LaneBorder::TYPE > | adore::if_r2s::TFunctionTypePair |