|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <occupancycylinderprediction.h>
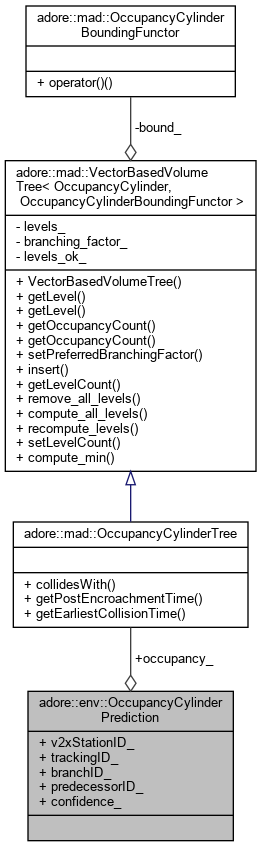
Public Attributes | |
| int | v2xStationID_ |
| int | trackingID_ |
| int | branchID_ |
| int | predecessorID_ |
| adore::mad::OccupancyCylinderTree | occupancy_ |
| float | confidence_ |
Data object for a behavior prediction
| int adore::env::OccupancyCylinderPrediction::branchID_ |
different optional behaviors may be predicted - this is an id for the branch, which has to be unique for a single trackingid
| float adore::env::OccupancyCylinderPrediction::confidence_ |
the confidence that an agent with trackingID will be enclosed in the given occupancy at future points of time
| adore::mad::OccupancyCylinderTree adore::env::OccupancyCylinderPrediction::occupancy_ |
prediction of occupied space at a given time
| int adore::env::OccupancyCylinderPrediction::predecessorID_ |
predecessorID_ references the branchID_ of a predecessor prediction. -1 for no predecessor
| int adore::env::OccupancyCylinderPrediction::trackingID_ |
internal tracking id corresponding to TrafficParticipantDetection::trackingID
| int adore::env::OccupancyCylinderPrediction::v2xStationID_ |
corresponding to TrafficParticipantDetection::v2xStationID