|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <envvehiclemotionstateconverter.h>
Public Member Functions | |
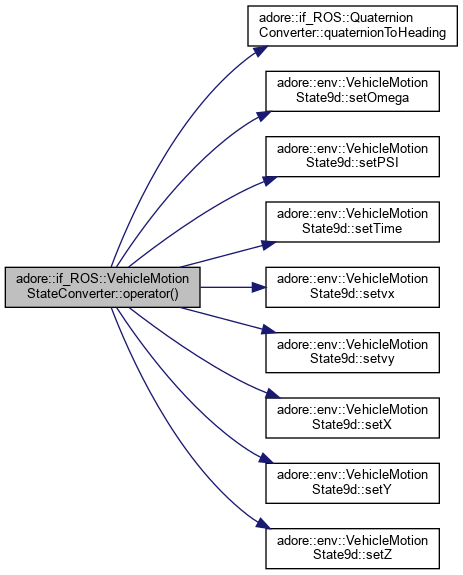
| void | operator() (nav_msgs::OdometryConstPtr msg, adore::env::VehicleMotionState9d *state) |
Conversions between adore::env::VehicleMotionState9d and ROS messages.
|
inline |
Converts a ROS odometry message into a VehicleMotionState9d object. Note that steering angle and longitudinal acceleration are not filled.