|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
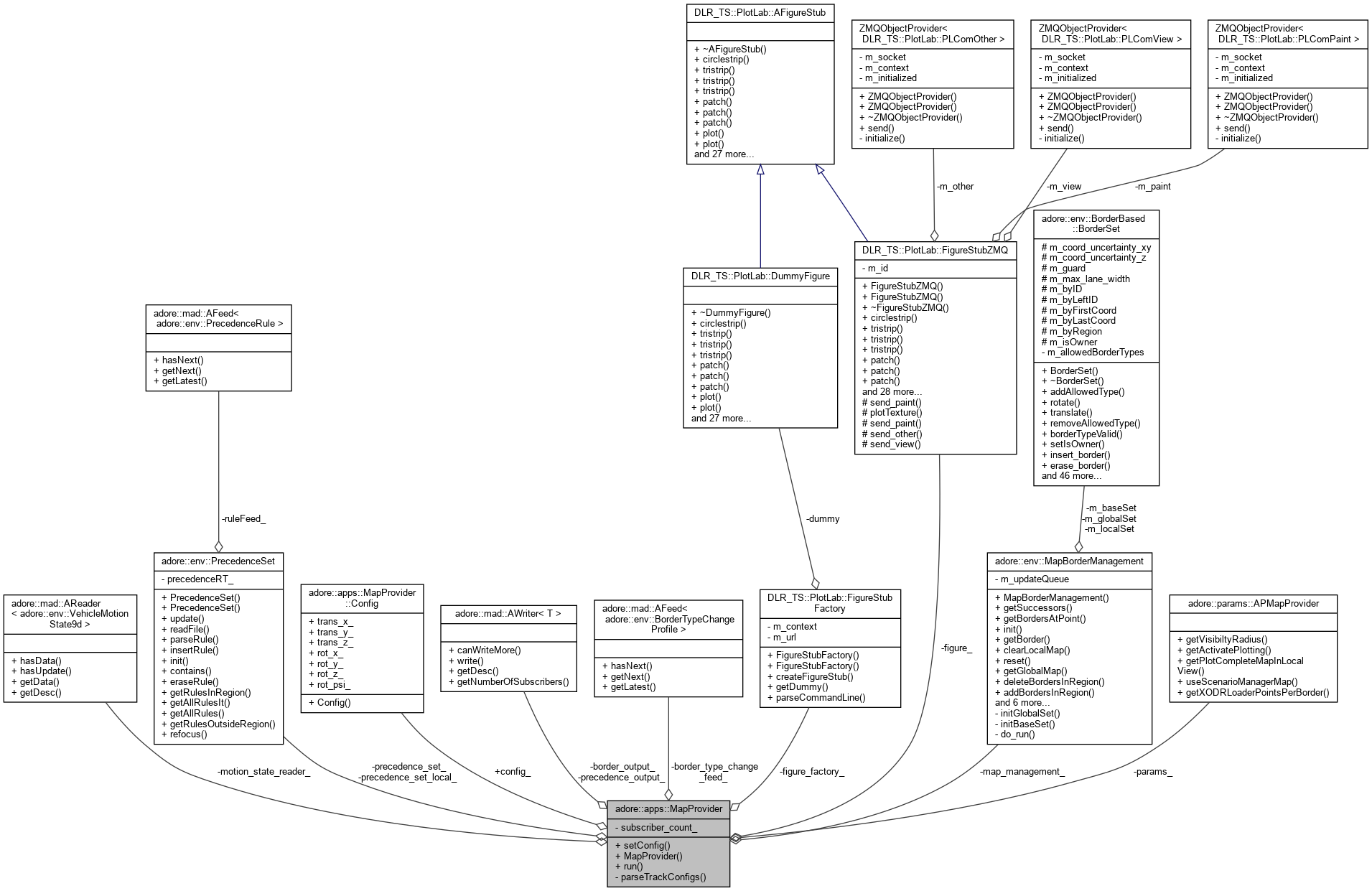
base class for middleware dependent implementations of the map provider module More...
#include <map_provider.h>
Classes | |
| struct | Config |
Public Member Functions | |
| void | setConfig (Config config) |
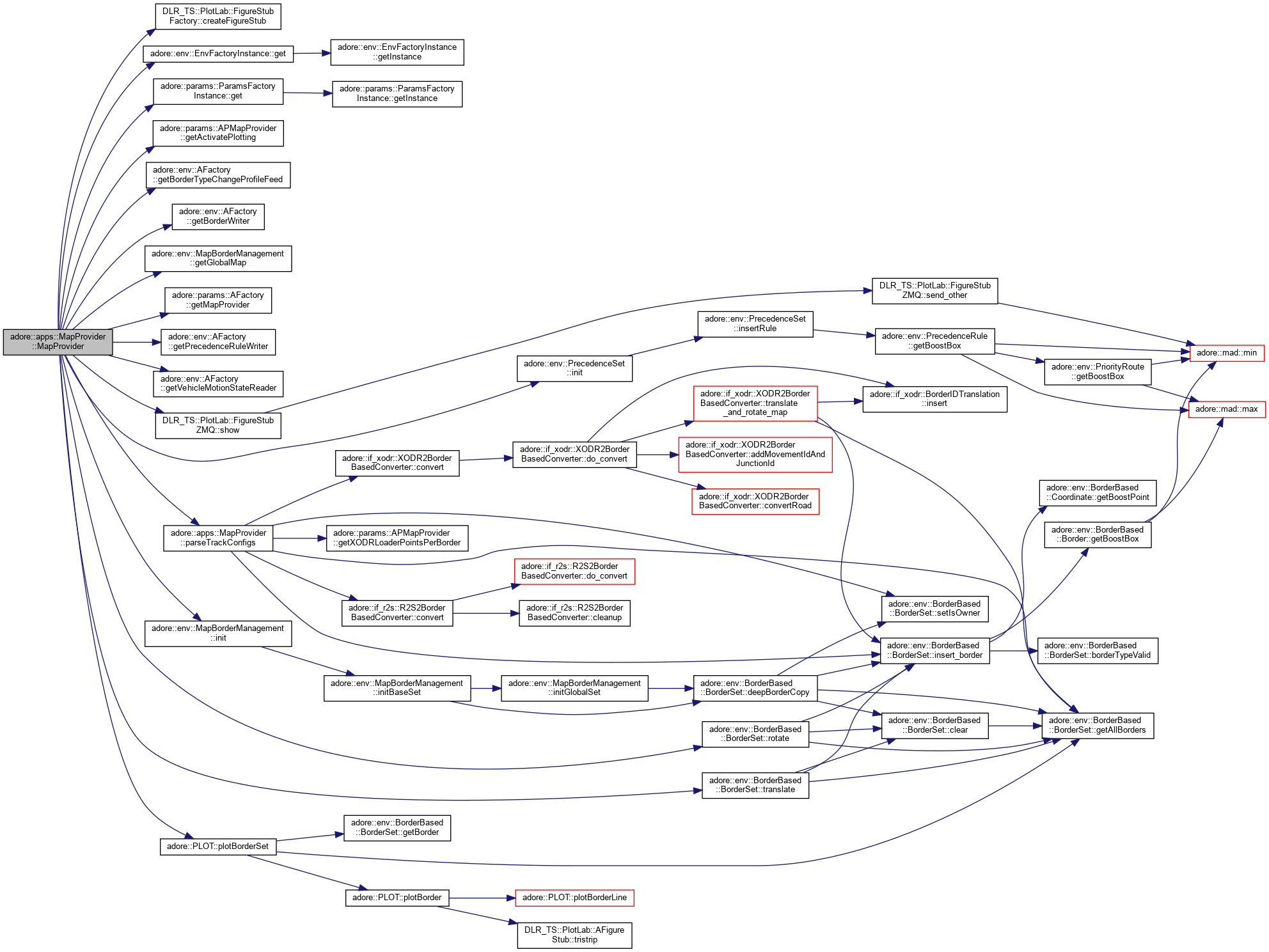
| MapProvider (std::string trackConfigs, adore::env::PrecedenceSet *pset, Config config) | |
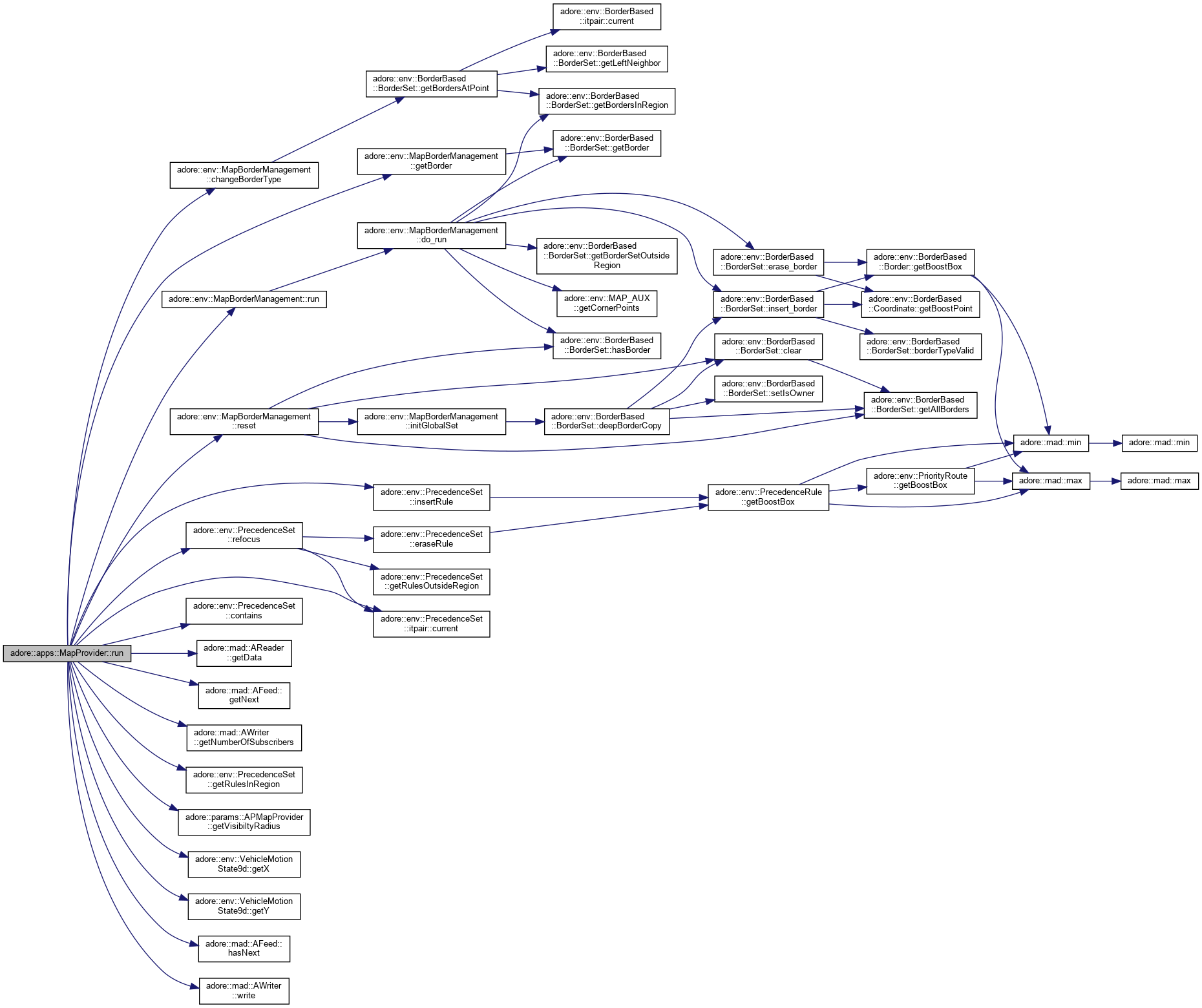
| virtual void | run () |
| update function More... | |
Public Attributes | |
| Config | config_ |
Private Member Functions | |
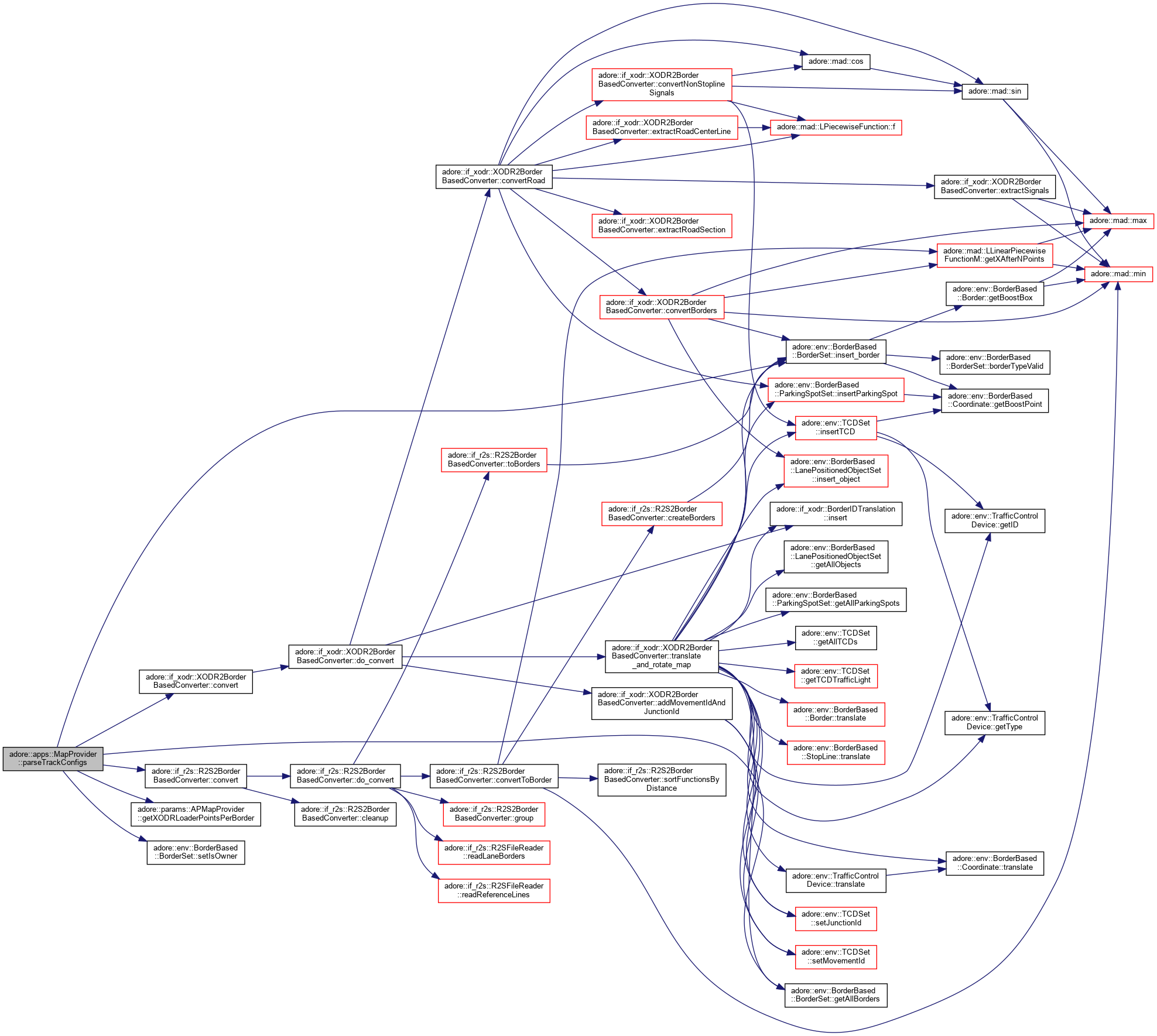
| void | parseTrackConfigs (std::string trackConfigs, env::BorderBased::BorderSet &targetSet) |
base class for middleware dependent implementations of the map provider module
The task of the map provider is to handle map information, specifically read OpenDrive files, and provide the contained information within the adore runtime framework
|
inline |
|
inlineprivate |

|
inlinevirtual |
update function

|
inline |
|
private |
|
private |
| Config adore::apps::MapProvider::config_ |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |