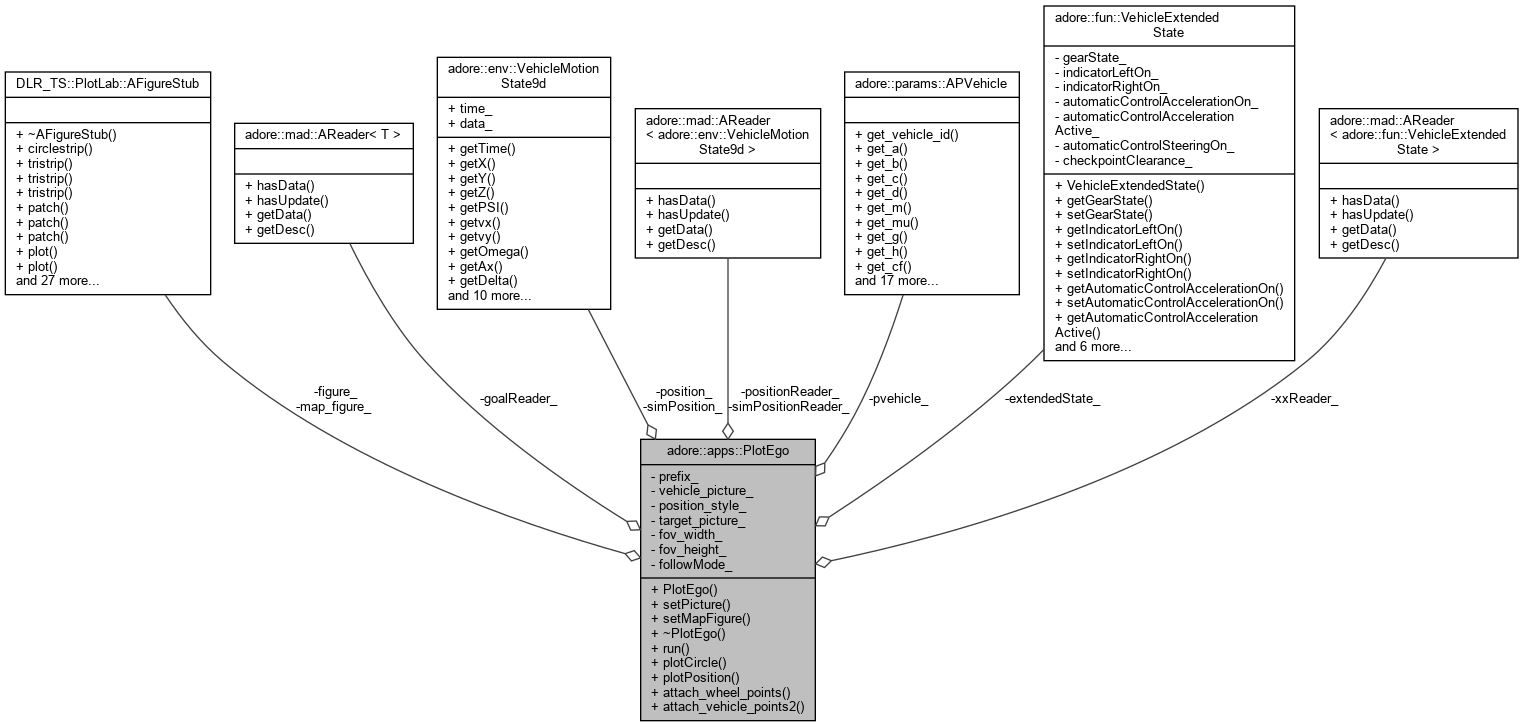
a optimzed plotting application to plot map borders, vehicles and environment information and background image satellite footage
More...
|
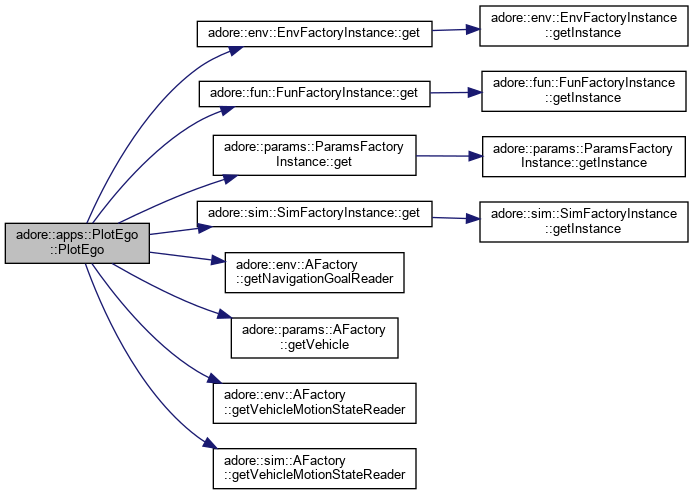
| | PlotEgo (DLR_TS::PlotLab::AFigureStub *figure, std::string prefix, int followMode) |
| |
| void | setPicture (std::string value) |
| |
| void | setMapFigure (DLR_TS::PlotLab::AFigureStub *value) |
| |
| | ~PlotEgo () |
| |
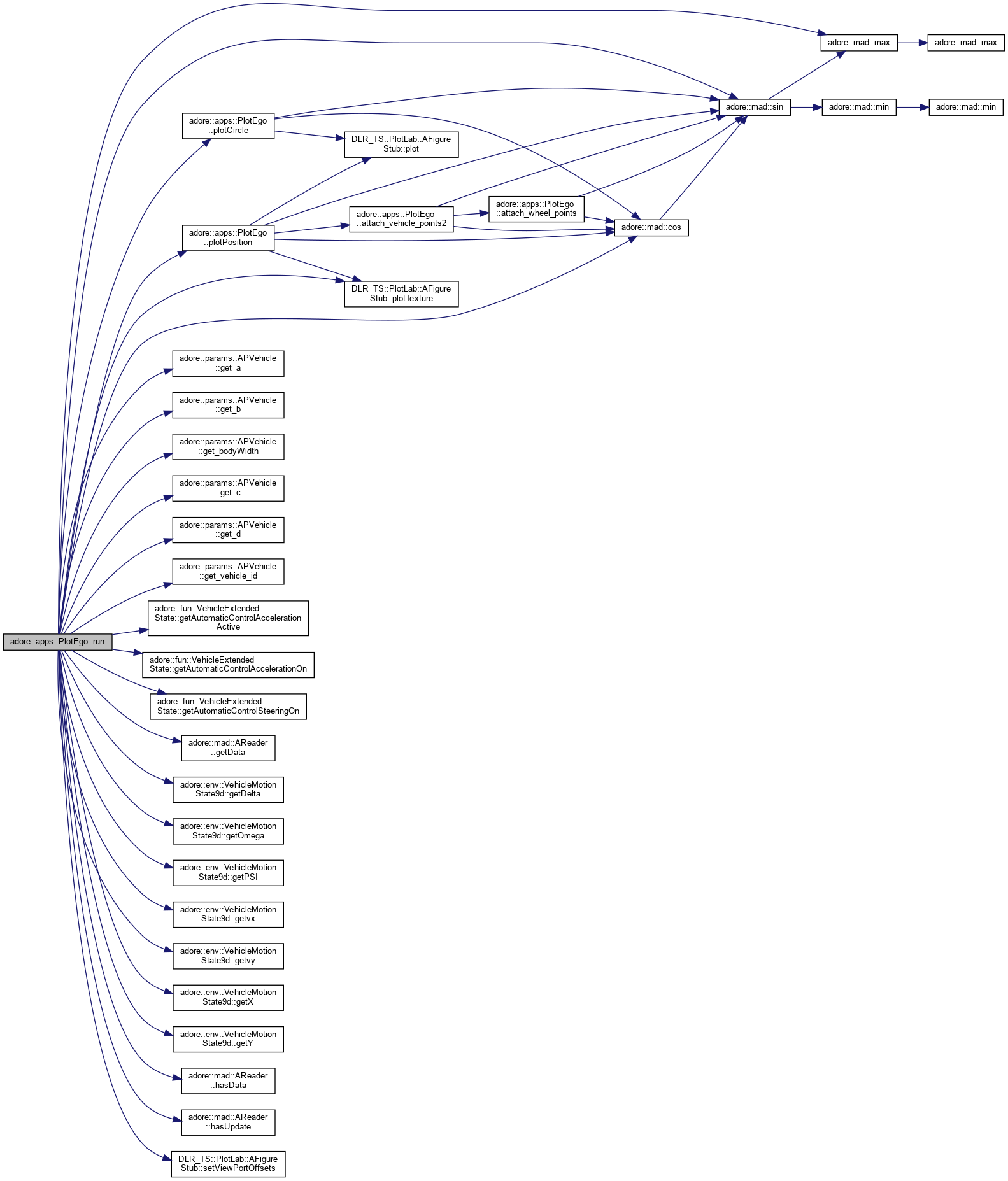
| void | run () |
| |
| void | plotCircle (const std::string &name, double gX, double gY, double R, const std::string &options, DLR_TS::PlotLab::AFigureStub *figure) |
| |
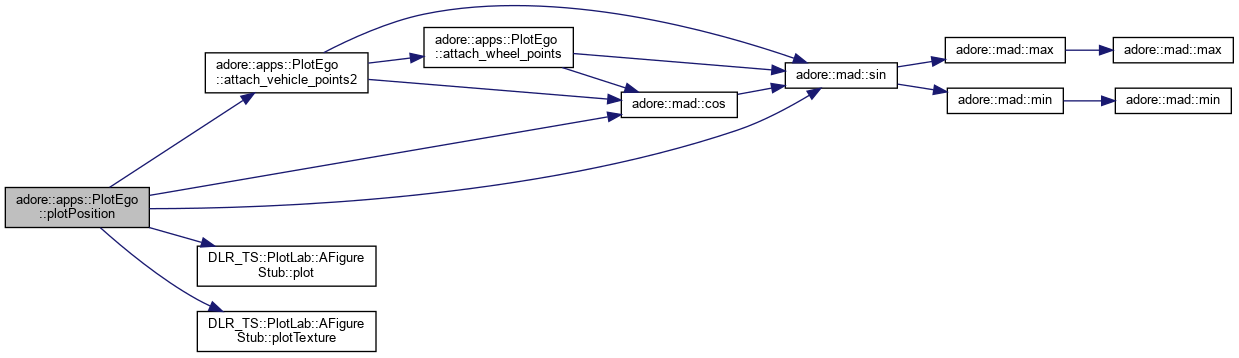
| void | plotPosition (const std::string &name, const std::string &vehicle_picture, double gX, double gY, double psi, double delta, double vx, double vy, double omega, double L, double c, double d, double w, double wheel_radius, double wheel_width, const std::string &options, DLR_TS::PlotLab::AFigureStub *figure) |
| | plotting a vehicle More...
|
| |
| void | attach_wheel_points (double x, double y, double delta, double wheel_radius, double wheel_width, std::vector< std::pair< double, double >> &points) |
| |
| void | attach_vehicle_points2 (double x, double y, double psi, double delta, double vx, double vy, double L, double c, double d, double w, double wheel_radius, double wheel_width, std::vector< std::pair< double, double >> &points) |
| |
a optimzed plotting application to plot map borders, vehicles and environment information and background image satellite footage