|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
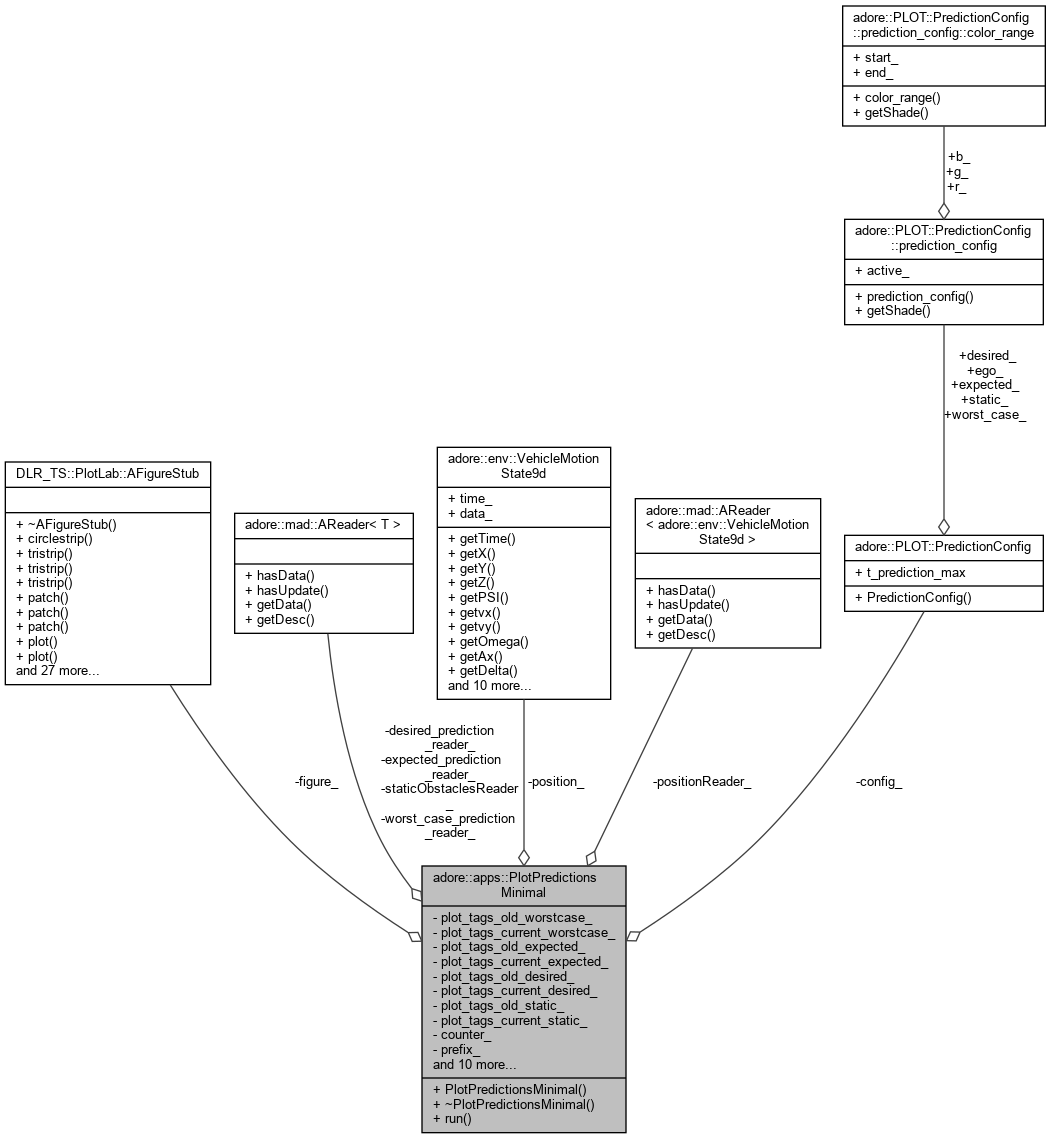
a plot module for handling prediction plots More...
#include <plot_predictions_minimal.h>
Public Member Functions | |
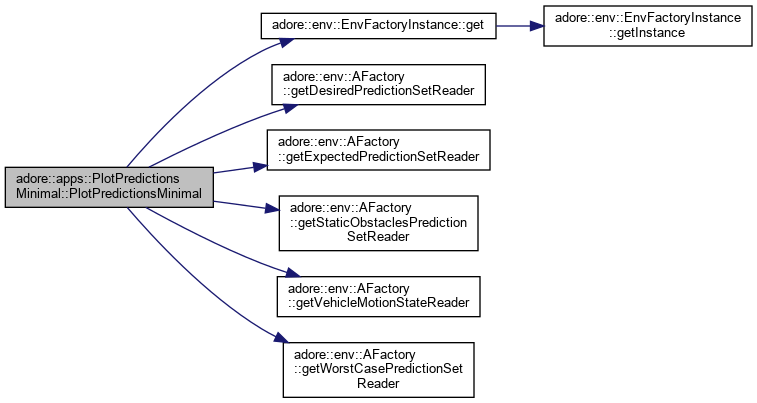
| PlotPredictionsMinimal (DLR_TS::PlotLab::AFigureStub *figure, std::string prefix, const adore::PLOT::PredictionConfig &config) | |
| ~PlotPredictionsMinimal () | |
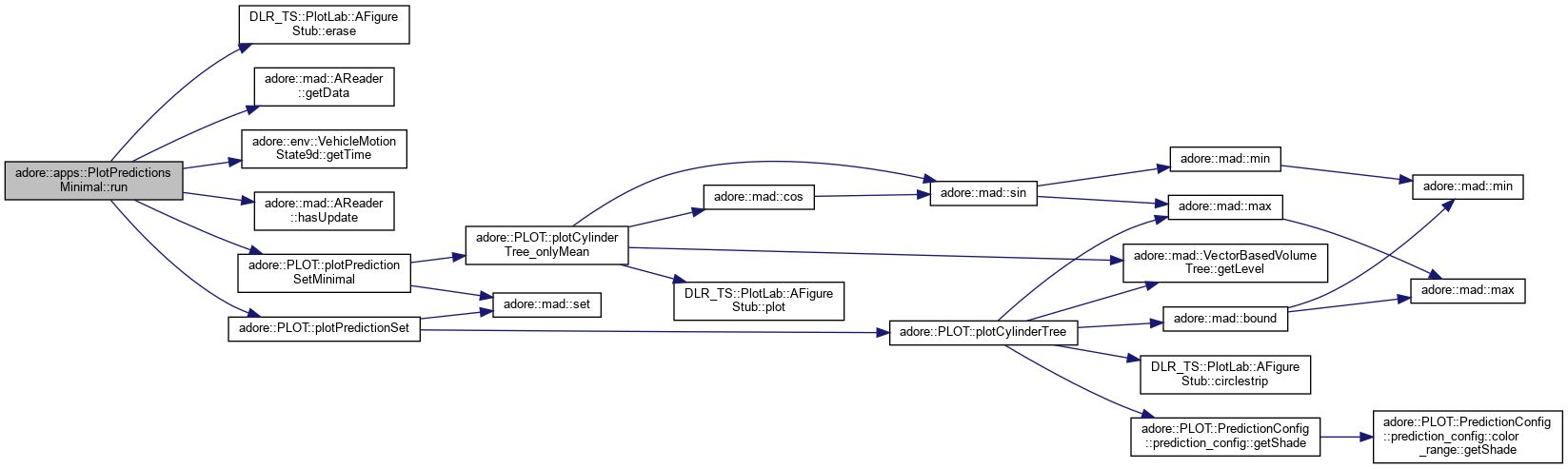
| void | run () |
a plot module for handling prediction plots
|
inline |
|
inline |
|
inline |

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |